激光干涉仪学习
1. 干涉仪是神魔
一种测量仪器,机械设计上的这个度那个度都能测,包括但不限于:
-
物体位移,或者说是在某方向上物体距离。这也就是最简单的那种激光干涉仪,用来测机床定位精度啊 间隙之类的
-
转动角度,oi!听起来好像最简单的激光干涉仪干不了这事儿,那怎么弄的呢,参考这篇博客激光干涉仪角度检测机床加工精度所说的和画的:
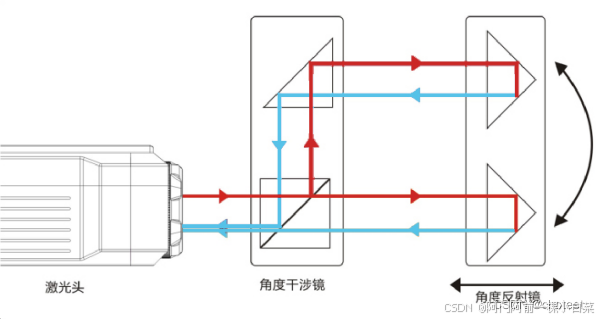
其实也还是简单的干涉原理,计算参考光和测量光的光程差(其实官方说法是相位差,但是不就体现为光程么),区别就是,此时参考光的光程也变了,和转动角度有关,是可计算的,唯一变量是转角,转角为0时,光程差是两个角度干涉镜之间的距离,也就是蓝色竖线a,设激光头的出射和入射孔间距为b,当转角为α时(逆时针为正的话),参考光光程变为原来的-(a+b)cos(α)/2,测量光光程变为原来的+(a+b)cos(α)/2,那光程差就变为(a+b)cos(α),a和b都已知,干涉条纹数一下得到n,光的波长λ已知,容易得出转角α(不知道这对不对反正先这么理解吧) -
直线度测量,让被测物体在干涉仪前面走一下,得到干涉仪到物体上每个点的距离,就得到了直线度
-
平行度和垂直度测量,两个方向共两组干涉仪,原理和直线度一样
-
平面度测量,面的对角上两个干涉仪
-
回转精度测量,干涉仪盯着转轴的母线上任意一点,测出一圈的距离,即可求出回转精度
-
位移,速度,加速度,振幅……一切运动量的测量
2. 差分干涉仪
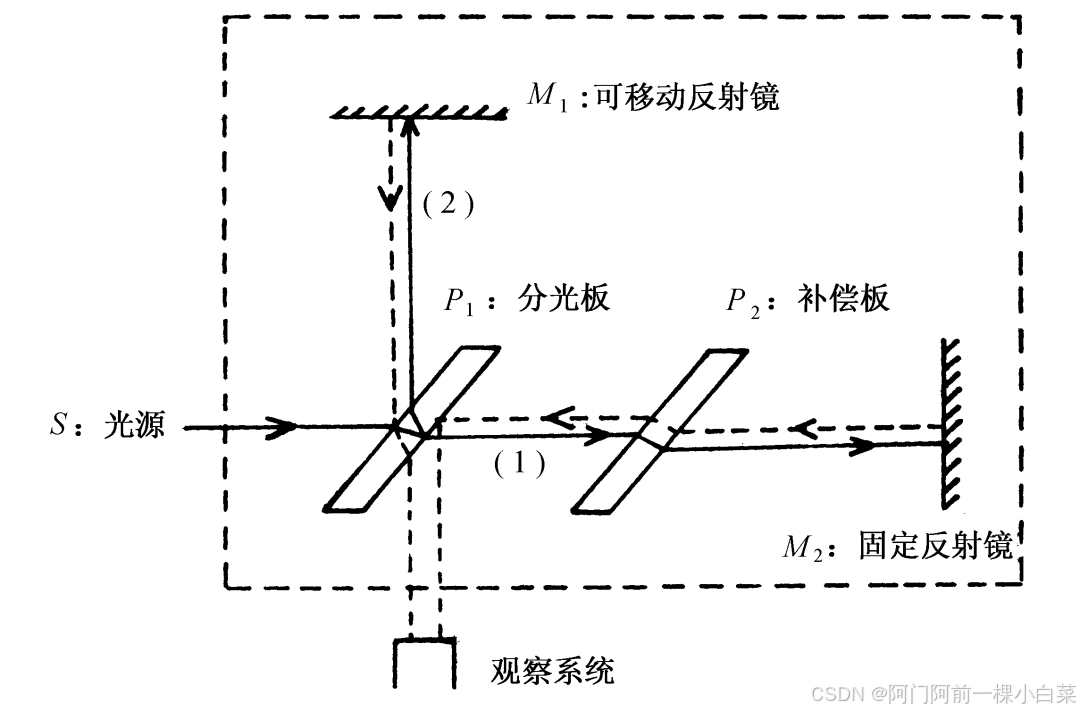
刚刚讲的干涉仪,它的参考镜是内置的,所以上面的a是固定不变的,也叫零差干涉仪,这种干涉仪更适合短距离、结构简单的情况。那长距离复杂情况怎么办呢,比如有机械振动、温度湿度气流气压影响导致物体产生相对位置偏移?这时候就要用到差分干涉仪,也就是外差干涉仪,顾名思义,这里把参考镜放在外面,而不是在干涉仪里面固定不动,这样参考光也会产生光程变化,这种干涉仪就可以抵抗复杂结构导致的各种偏移,获得更高精度的测量结果。
具体的图可以看这个:
啊啊啊啊我怎么找不到现成的图,蒜了,图等我有空了画吧……其实上面的角度测量就是一种差分干涉仪,也就是测量镜在外面,测量光的光程会变,甚至入射角度会变,光的波长也会变(但是这个波长变化往往是有波长跟踪器在跟着的,所以是已知量),进行一个差分计算,求得所需变化量
(我还不知道咋差分)
(今天先写到这2025.4.7)
3. 干涉仪的系统校准
3.1 影响激光干涉仪的条件
-
温度。温度会导致物体尺寸发生变化,热胀冷缩啊,局部温度变化也会导致形变之类的直接导致光路长度变化;还会影响介质折射率,而实际波长与真空波长的关系为:
λ a i r = λ v a c u u m n λ_{air}= \frac{λ_{vacuum}}{n} λair=nλvacuum
其中空气折射率n随温度变化(由Edlén公式可知),温度升高,空气(或其他介质比如反射镜分光镜之类的)密度降低,折射率减小,空气中的激光波长增加,进而影响光程差。局部温度不均匀还会导致光路发生偏转,导致几遍,降低干涉条纹的对比度 -
湿度。高湿度可能导致光学元件表面吸附水分,影响激光的传播和反射。因此,环境湿度应保持在 40%-60%的范围内。可通过除湿设备或通风系统来控制湿度。
-
气压。气压变化也会导致介质折射率变化,进而影响光程
-
振动和空气紊流(湍流)。机械振动或空气湍流会导致干涉条纹抖动,影响信号稳定性
-
光路对准。没对准,激光光束和运动轴未同轴的话会有余弦误差导致测量值偏小,而光学镜组安装高度偏离被测物体时,会产生阿贝误差,导致测出误差放大
-
光学元件和激光发射器。激光频率不稳定会引入波长误差,需要波长跟踪器来实时监测波长,并用一些技术来稳定频率(比如热稳频技术)、表面污染、安装不当等都会导致光路偏移、条纹对比度下降,要定期清洁校准
-
机械振动。应该就是说干涉仪的位置发生变化了,需要结合干涉仪数据,用误差补偿软件进行修正
3.2 校准和补偿方法
-
系统校准方法
- 的的的(还没找到)
-
软件补偿
- 利用误差模型自动生成修正方案。温度-位移函数、角度补偿算法等
(今天先写到这2025.4.8)
- 利用误差模型自动生成修正方案。温度-位移函数、角度补偿算法等