(八)PMSM驱动控制学习---无感控制之滑膜观测器
在FOC矢量控制中,我们需要实时得到转子的转速和位置 ,但在考虑到成本和使用场合的情况下,往往使用无感控制,因为无位置传感器克服了传统机械式传感器的很多缺点和不足。比如,机械式传感器对环境要求比较严格,在恶劣环境下无法精确测量,还会增加控制系统的开销和尺寸。但是无位置传感器的测量方法就没有这个问题。
本篇将介绍滑膜观测器的设计,得到反电动势,从而提取出位置和转速信息。
目录
一.滑模变结构控制
(1)滑膜控制的概述
(2)滑动模态的概念
(3)滑模变结构控制的定义
二.滑膜观测器算法
(1)什么是观测器
(2)建立系统数学模型
(3)滑膜观测器设计
三.基于反正切函数的转子位置估计
四.基于锁相环的转子位置估计
(1)基本锁相环原理
(2)静止坐标系下的锁相环
一.滑模变结构控制
在介绍滑膜观测器之前,我们先简单了解一下滑膜控制。
(1)滑膜控制的概述
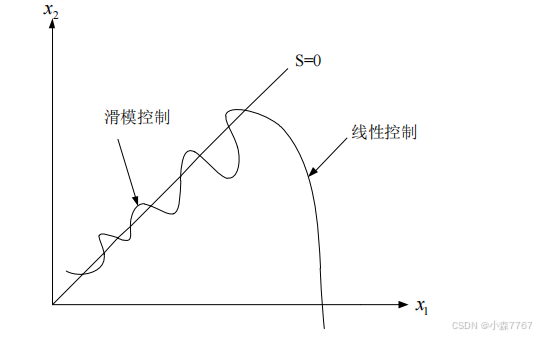
滑模控制是变结构控制系统的一种控制策略。这种控制策略与常规控制的根本区别在于控制的不连续性,即一种使系统结构随时间变化的开关特性。这种特性可以使系统在一定条件下沿规定的状态轨迹作小幅、高频率的上下运动,这就是所谓的“滑动模态”。这种滑动模态是可以设计的,并且与系统的参数和扰动无关。因此,处于滑动模态的系统具有很好的鲁棒性。
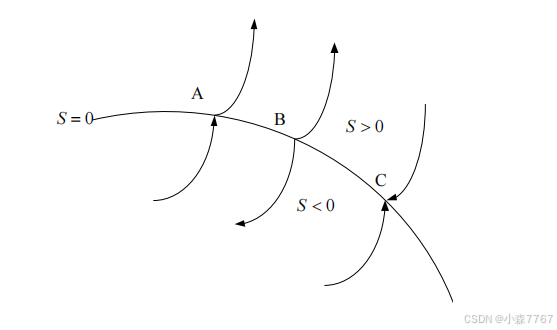
(2)滑动模态的概念


(3)滑模变结构控制的定义
![]()
![]()
![]()
按照滑模控制理论的基本原理,正常运动阶段必须满足滑动模态的可达性条件![]() ,才能实现系统的状态空间变量由任意未知的初始状态在有限时间内到达滑模面因此,可以设计各种趋近律函数来保证正常运动阶段的品质。常用的趋近律有:
,才能实现系统的状态空间变量由任意未知的初始状态在有限时间内到达滑模面因此,可以设计各种趋近律函数来保证正常运动阶段的品质。常用的趋近律有:
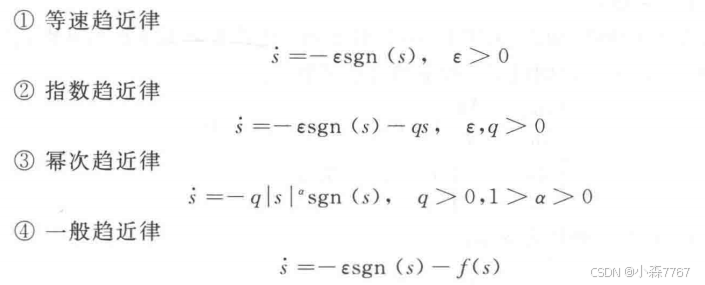
这几种趋近律都先天满足可达性条件,从而可以便于求解控制函数。
二.滑膜观测器算法
(1)什么是观测器
👉 在控制系统中,观测器是一种通过系统的输入信号和可测量的输出信号,结合数学模型,实时估算系统内部不可直接测量的状态变量的算法或装置。
而我们的滑膜观测器就是用于“观测” 我们不可直接测量的α和β轴反电动势的值,又因为我们反电动势包含了电机位置和速度信息,从而可以反求出位置和速度信息。
当我们已知一个系统的状态方程,其中包含了我们想要知道的不可测的变量。此时我们可以构建一个与该方程一摸一样的观测器,其中观测器中的不可测变量则设为控制函数u。通过两个方程的比较及其反馈控制,就可以得到我们需要的值(下面会详细介绍电机控制中,滑膜观测器的设计方法)。

(2)建立系统数学模型
传统的滑模观测器的数学建模是在两相静止坐标系下进行的,写出永磁同步电机在α-β轴静止坐标系下的数学模型:
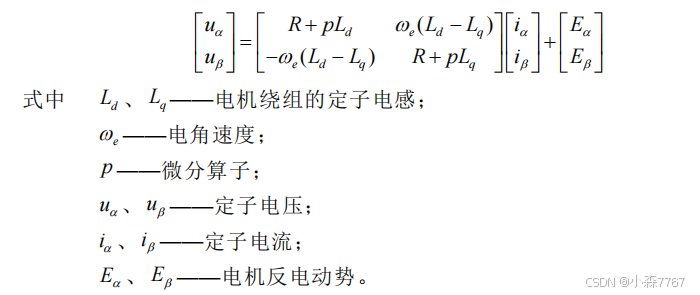
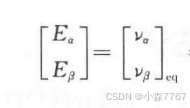
电机的两个扩展反电动势(EMF)满足如下关系:


(3)滑膜观测器设计



这里我们的滑模面函数设计为我们状态方程与观测器的差值,即电流实际值与估计值的差值,当差值为0,也就是s (x) = 0时,我们的反电动势和估计反电动势就相等了:
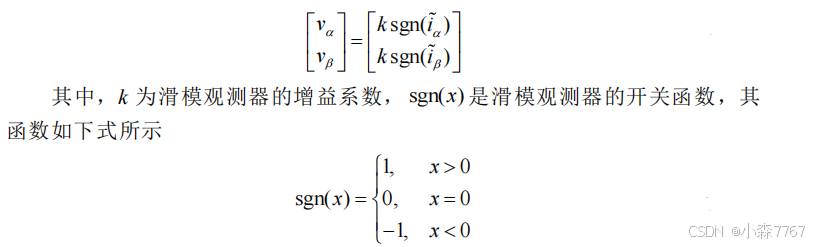
我们知道控制函数是由定子电流的误差而求得的,这个函数可以连续地修正定子电流实际值和估计值之间的误差,直到误差减小到零为止。同时为了保证定子电流能够收敛到滑模面上,可以将控制函数设计成如下的形式:(也就是我们的趋近律,保证滑动是收敛的)
根据等效控制原理,这种情况下滑模观测器的控制函数的输出量可作为等效控制量来使用,即
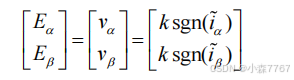
我们就得到了所需的α-β轴的反电动势。
三.基于反正切函数的转子位置估计
再来回顾一下反电动势的方程:
⭐我们可以清晰的知道,转子位置信息Eα/Eβ=tan(θe),从而可以用反正切函数直接算得我们的θe。

滤波处理获得的反电动势估算分量会引发相位延迟,该延迟将直接影响转子位置的估算准确性,较小的滤波截止频率将引发较大的相位延迟在实际应用中为解决该问题,通常需要在计算出转子位置的基础上再加上角度补偿,用来弥补由于低通滤波器的延迟效应所造成的位置角度估算误差

反正切函数的滑膜观测器控制框图如下:

四.基于锁相环的转子位置估计
由于滑模控制在滑动模态下伴随着高频抖阵,因此估算的反电动势中将存在高频抖阵现象。基于反正切函数的转子位置估计方法将这种抖阵直接引入反正切函数的除法运算中,导致这种高频抖阵的误差被放大,进而造成较大的角度估计误差。
而锁相环(PLL)是一种封闭的自适应系统,在谐波较大和电压相位角度不对称的不利条件下也能很好的发挥它的跟踪性能。所以我们也常用锁相环的方式跟踪和估计电机转子的位置信息。
(1)基本锁相环原理
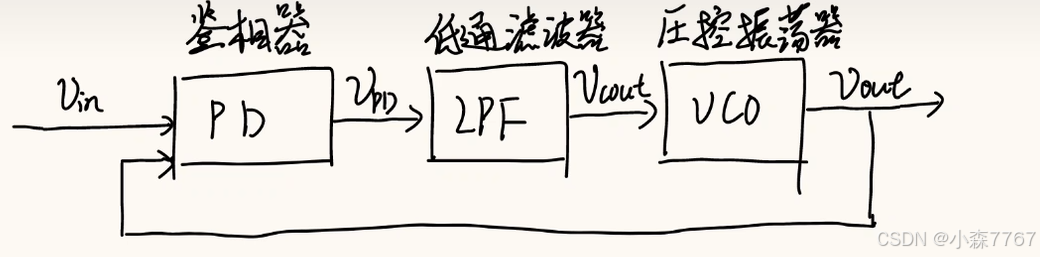
锁相环由三个核心模块组成:
鉴相器:比较Vin与Vout的相位差,生成误差电压。也就是看两信号的相位、频率是否一致。
低通滤波器:滤除鉴相器输出的高频噪声,生成平滑的误差控制信号。
压控振荡器:根据滤波器的控制电压调整输出频率,最终使相位差归零。也就是使Vout跟踪Vin。
(2)静止坐标系下的锁相环

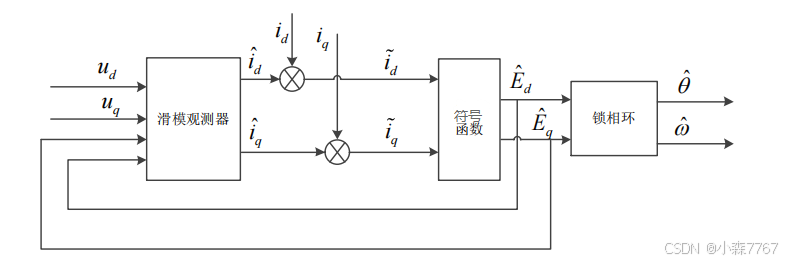
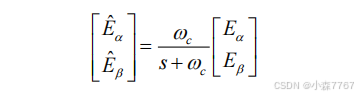
输入为观测到的反电动势,输出为真实的转速和转子位置
由框图我们可知:
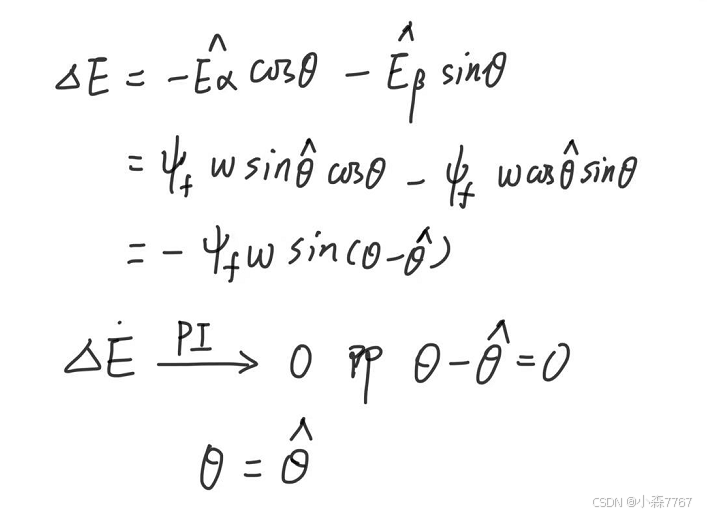
当🔺E通过PI控制器后,当其等于0时,θ就等于θ帽,我们的输出就为真实的位置与转速。
其中,求出🔺E的过程相当于鉴相器,PI调节相当于低通滤波器和压控振荡器
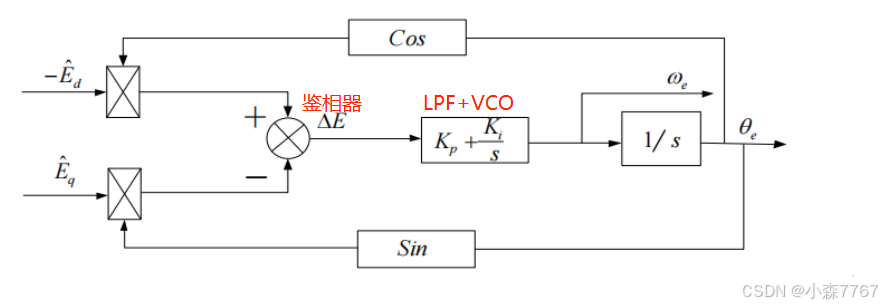
这样一来,转子磁链的影响就被大大削弱了,并且从反正切函数法的开环变成了闭环,得到了相对准确,高频相对较少的结果。
基于锁相环的滑模观测器测量转子速度和位置信息框图如下: