Simulink与C的联合仿真调试
背景
simulink的Matlab Function,默认采用double类型的数据,无法定制int或者single类型的数据;Simulink中的Matlab Function直接调用.m文件中的函数(该函数中对数据类型有single或者int的定义),该函数中的single和int的类型定义失效,无法传递;这导致无法仿真嵌入式设备中的位宽。在Matlab Function中,下面的定义,实际的效果也是double类型。
persistent var;
if isempty(var)var = zeros(2,1,'single');
end上述代码中,var仍旧是一个double为仿真嵌入式中的位宽,期望采用Simulink与C语言联合仿真调试,希望仿真的同时,也能调试C C++代码。
方案
Simulink所支持的C debugger如下所示,本人采用红框中的方案。

安装
1. 下载安装Visual Studio Code
Download Visual Studio Code - Mac, Linux, Windows
2. 安装MATLAB Support for MinGW-w64 C/C++/Fortran Compiler
MATLAB Support for MinGW-w64 C/C++/Fortran Compiler - File Exchange - MATLAB Central
下载得到mingw.mlpkginstall文件,直接将其拖到Matlab的命令窗口,进行安装。对于Matlab 2023a/2023b/2024a/2024b,可能会提供MinGW版本选择。我用的是2022b,直接用MinGW6.3版本。
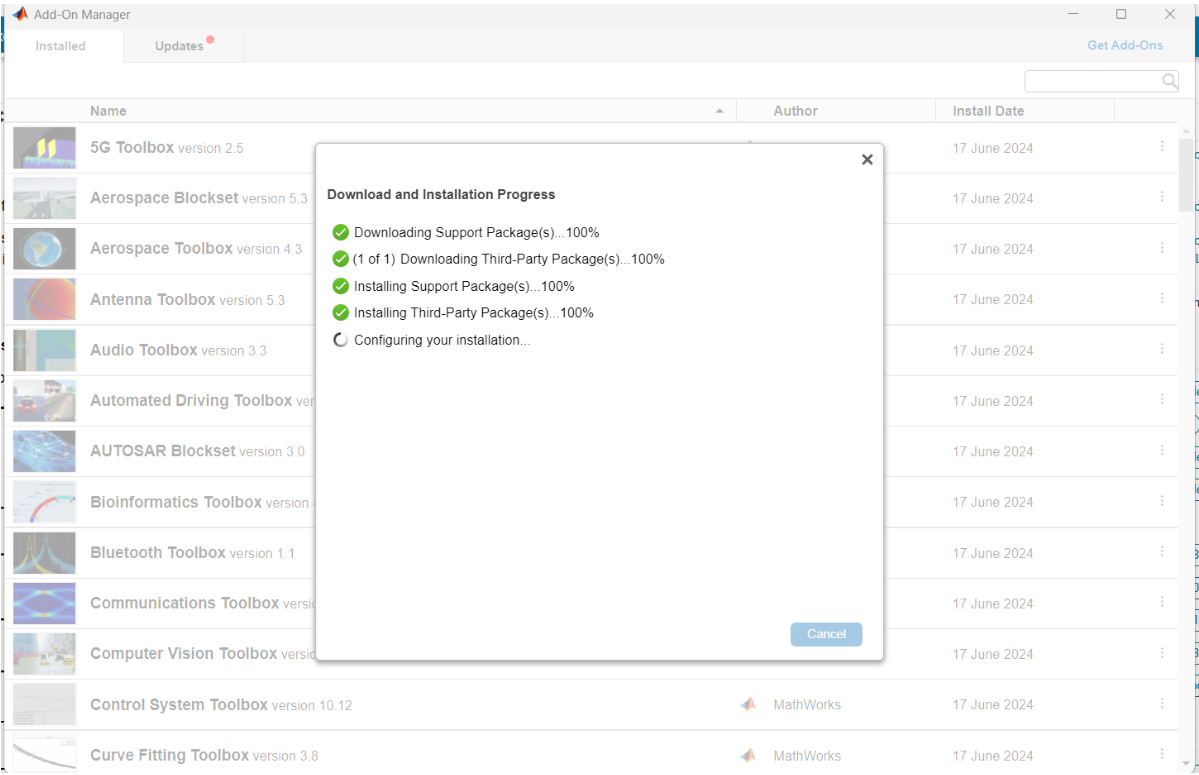
3 安装MATLAB Coder Interface for Visual Studio Code Debugging - File Exchange - MATLAB Central
下载得到vscodedebug.mlpkginstall文件,直接将其拖到Matlab的命令窗口,进行安装。
4 Visual Studio Code添加插件
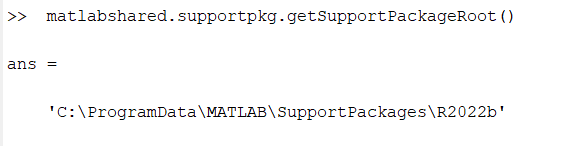
在matlab命令窗口中用matlabshared.supportpkg.getSupportPackageRoot()查询要安装的插件位置,如下所示:
在Visual Studio Code中添加插件
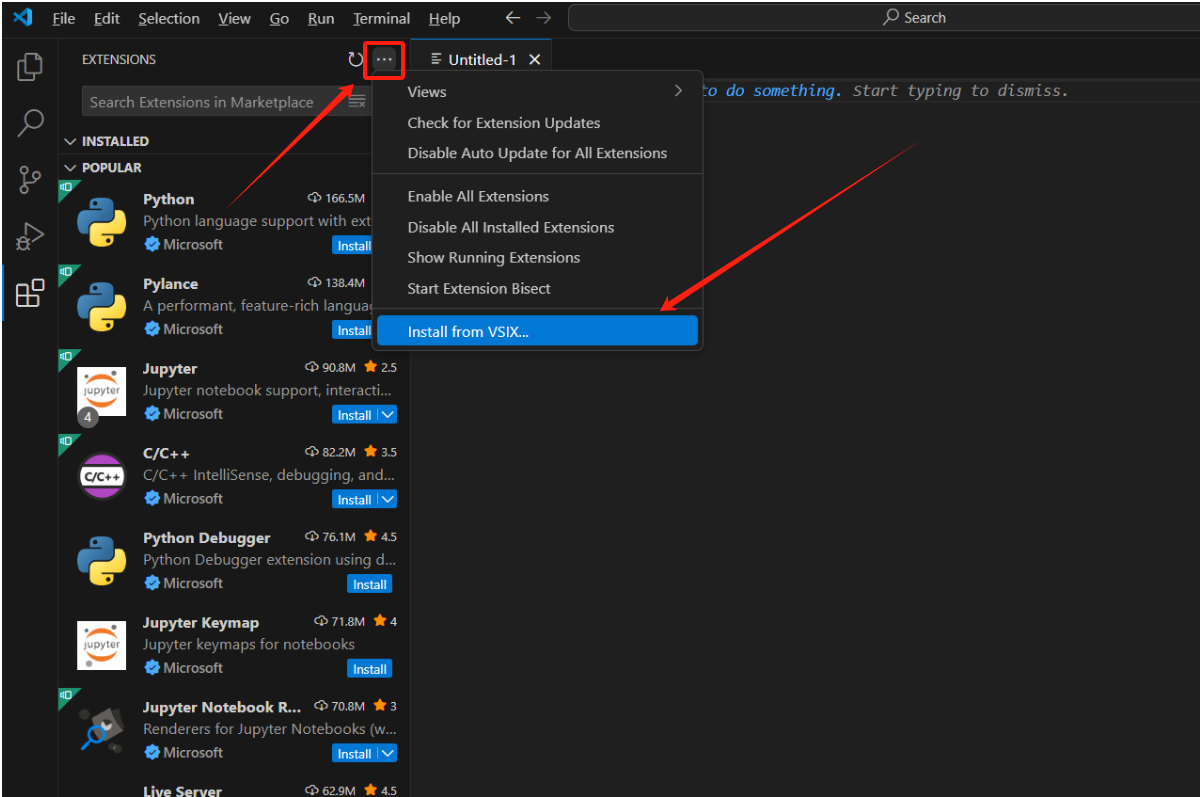
根据查询出的插件位置,选择插件安装

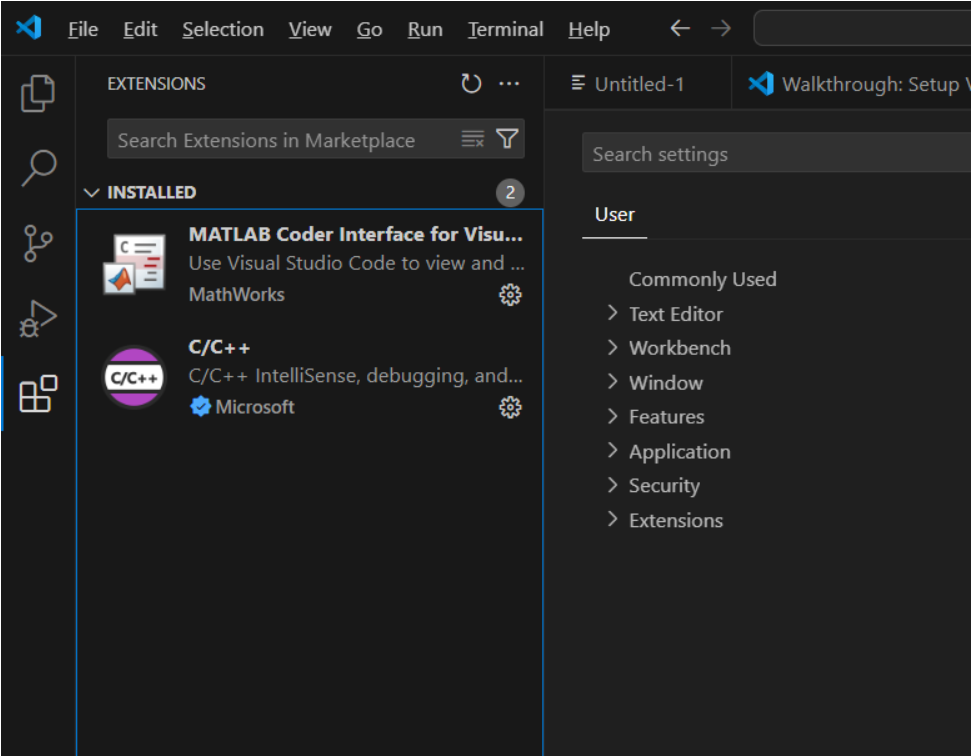
安装完成后,如下所示
测试
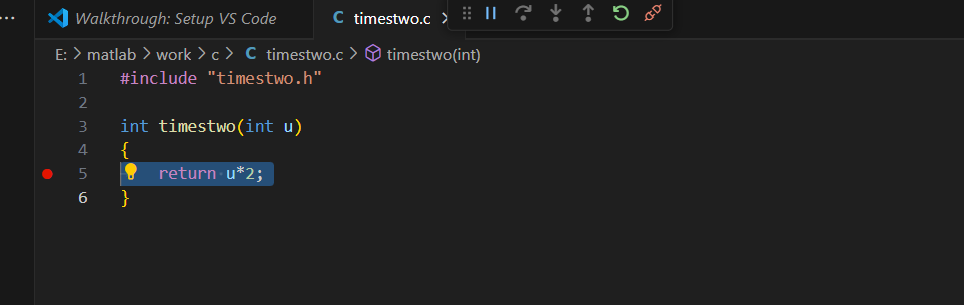
1. 编辑.h和.c文件
#ifndef _TIMES_TWO_
#define _TIMES_TWO_
int timestwo(int u);#endif#include "timestwo.h"int timestwo(int u)
{return u*2;
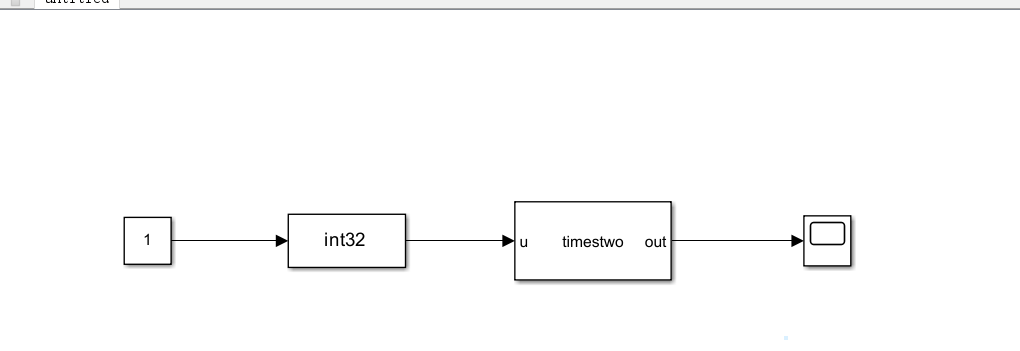
}2. 创建Simulink仿真模型
用C Caller和convert创建如下所示的模型
配置C文件
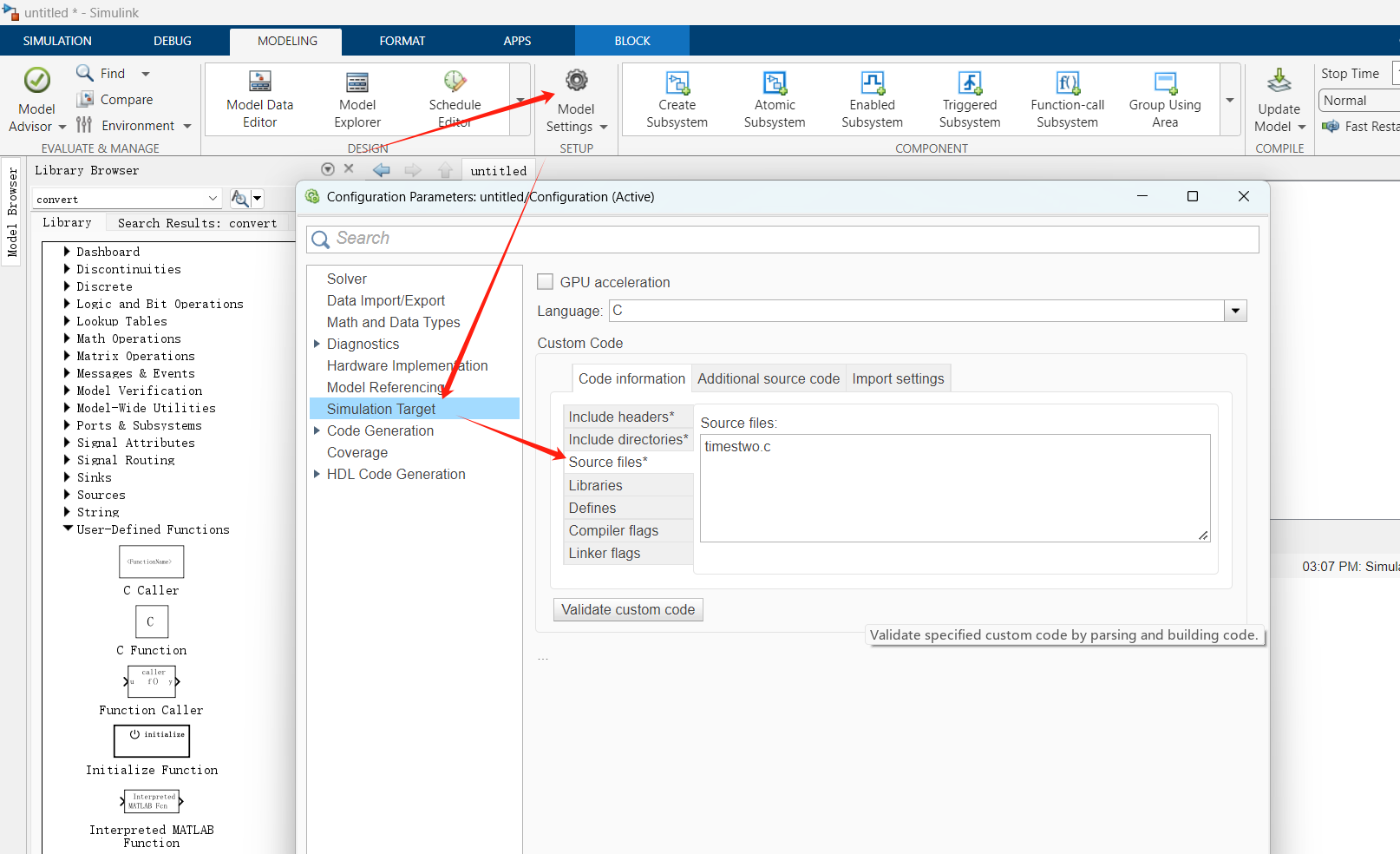
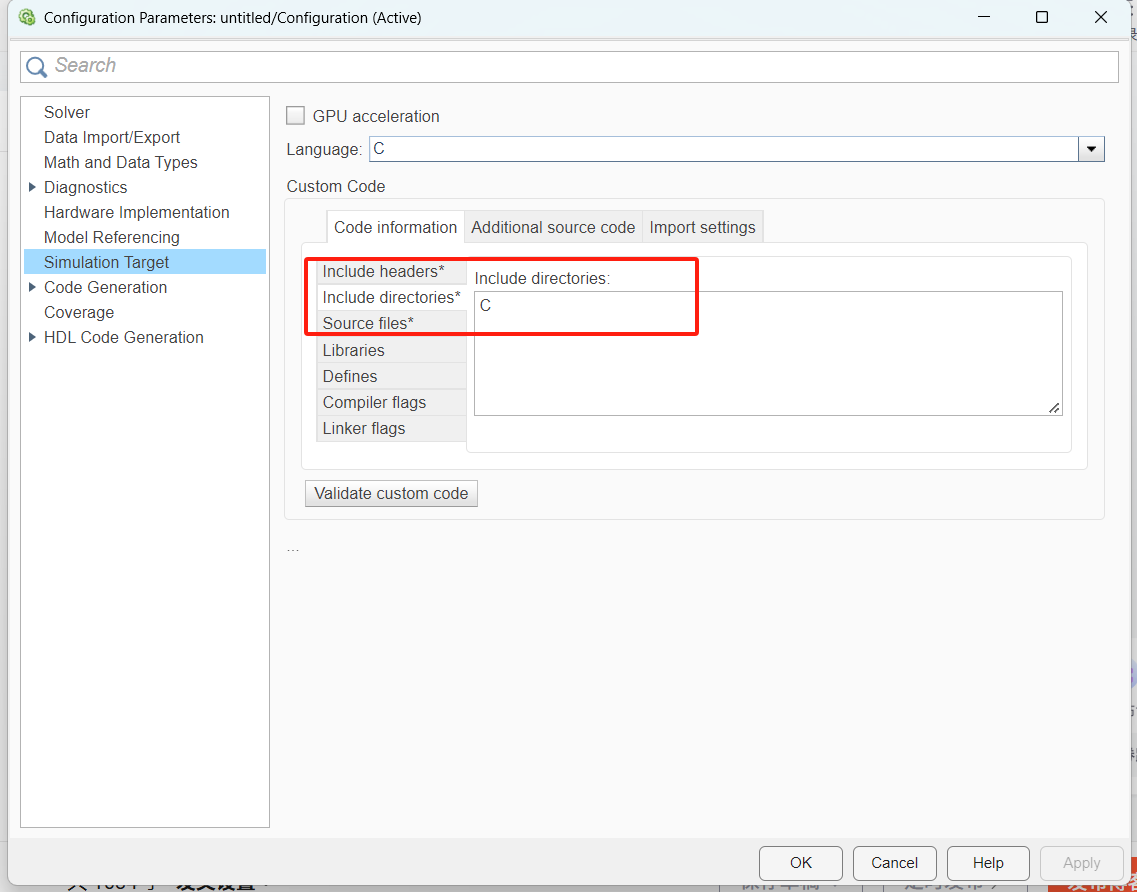
配置C文件路径(如果C文件路径和slx工程路径不一致,就需要配置)。我这里采用相对路径,即./C来存放c文件和h文件。
使用自动填充,来包含头文件。(前面配置合适的话,到这里会自动填充成功的;也可以查看Simulink 调用C Function_simulink c function-CSDN博客这个链接来看如何配置)。
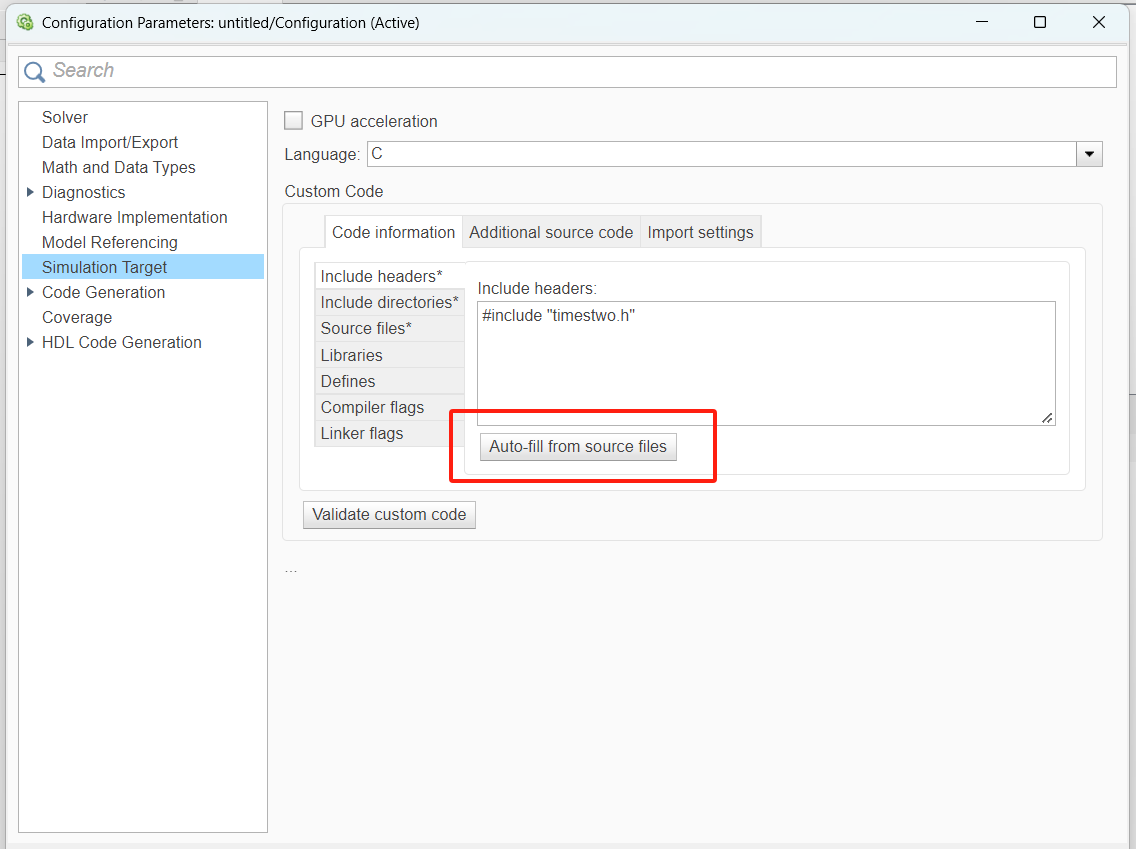
自动填充“Auto-fill from source files”成功后,说明源文件和头文件没有错误。如果有错,会在simulink中下图红框这个位置提示错误。
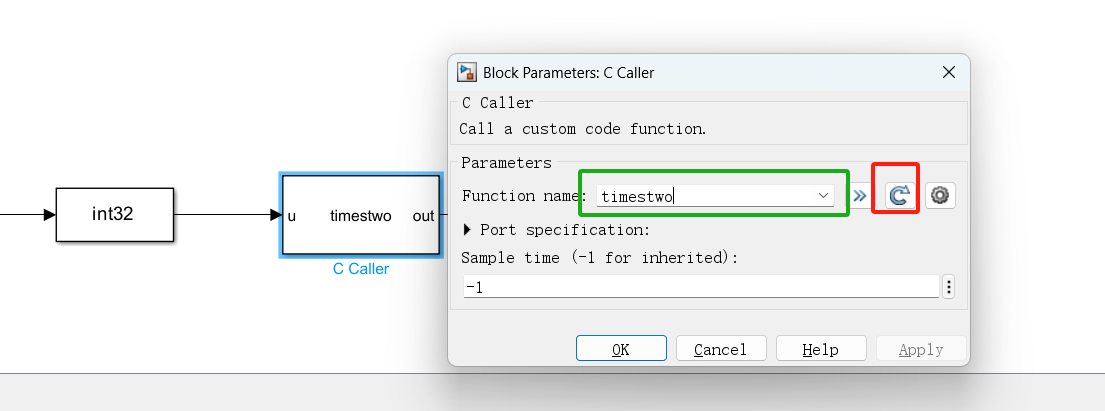
双击 C Caller,配置函数。先点击红框进行刷新(防止绿框中不显示函数),再从绿框中选择对应的函数名。
4 打断点
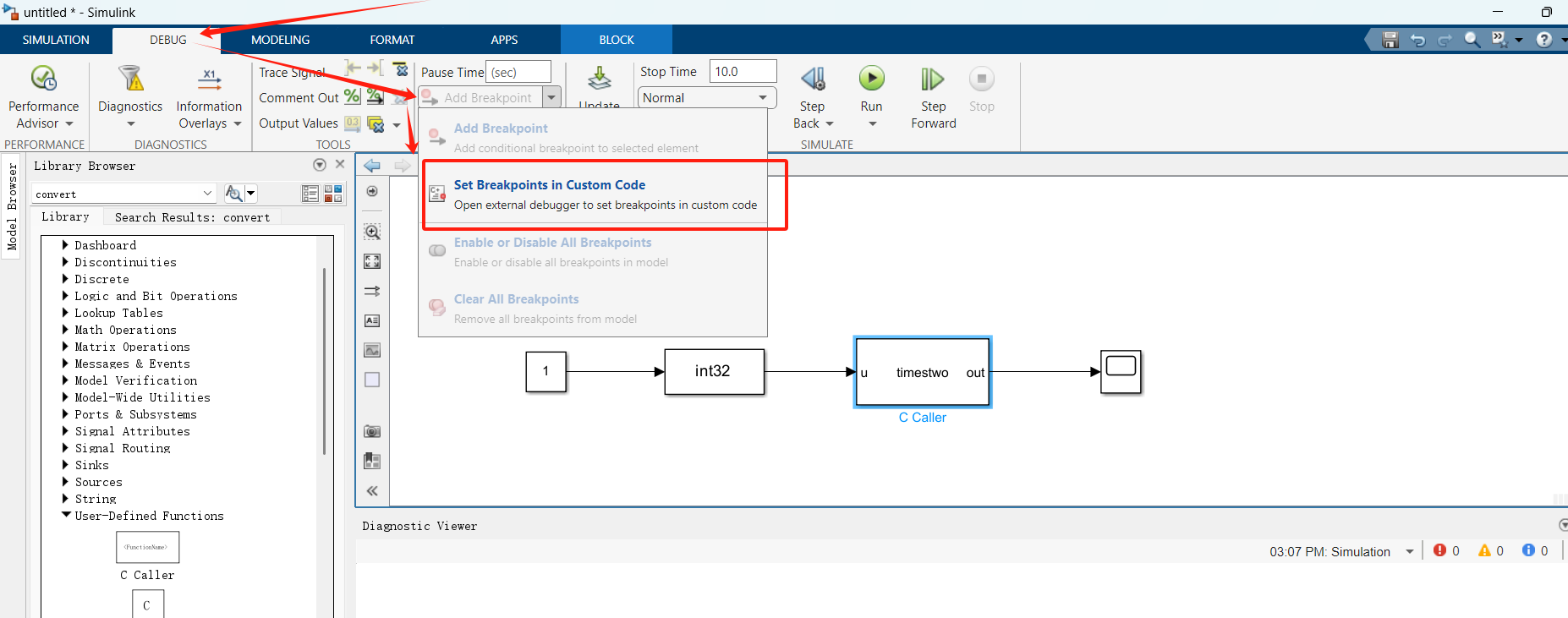
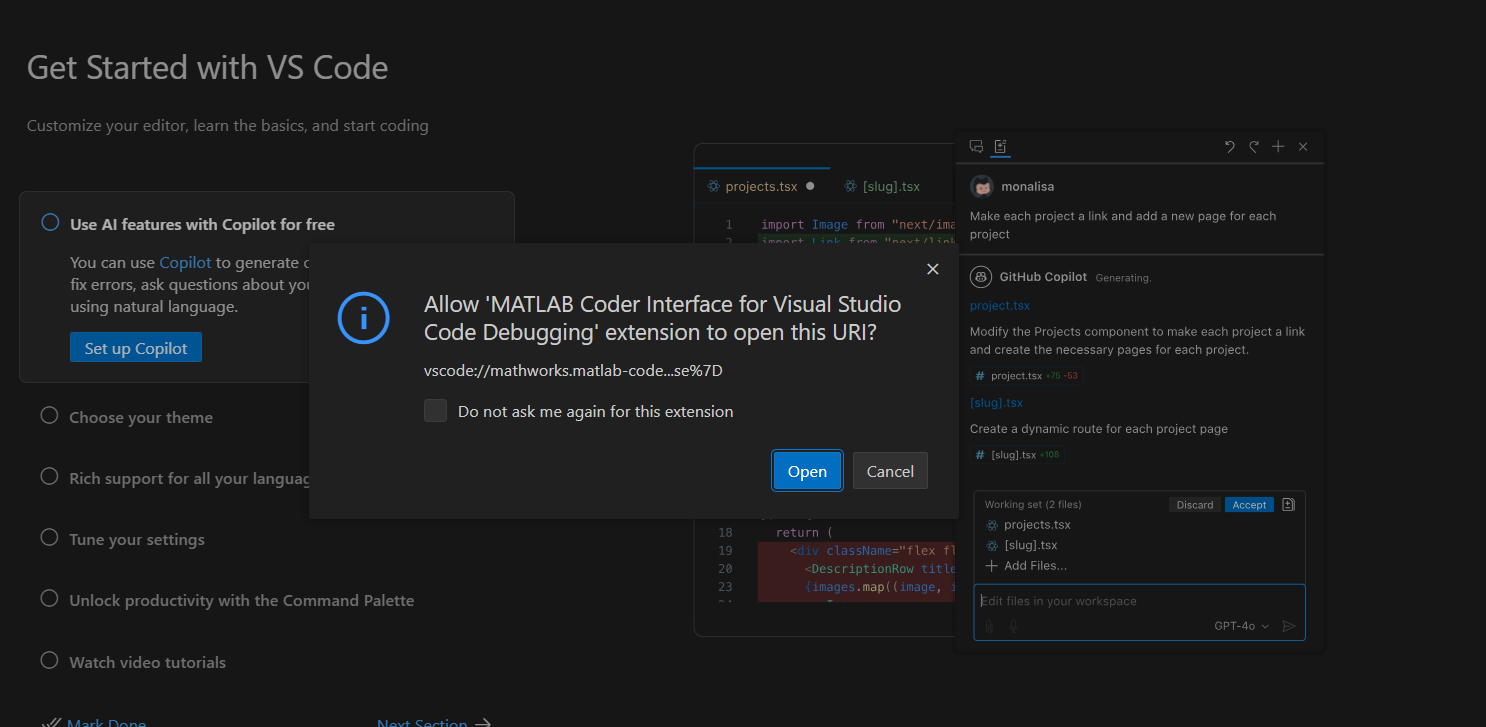
按上图所示点击后,会关联启动Visual Studio Code,如下图所示,选择Open。
配置断点
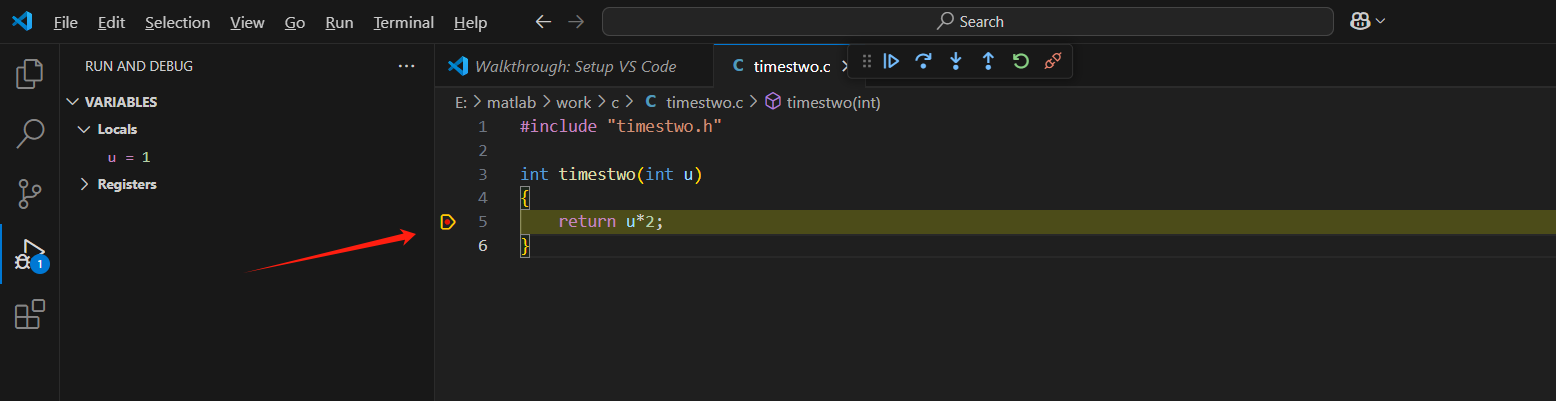
5 调试仿真
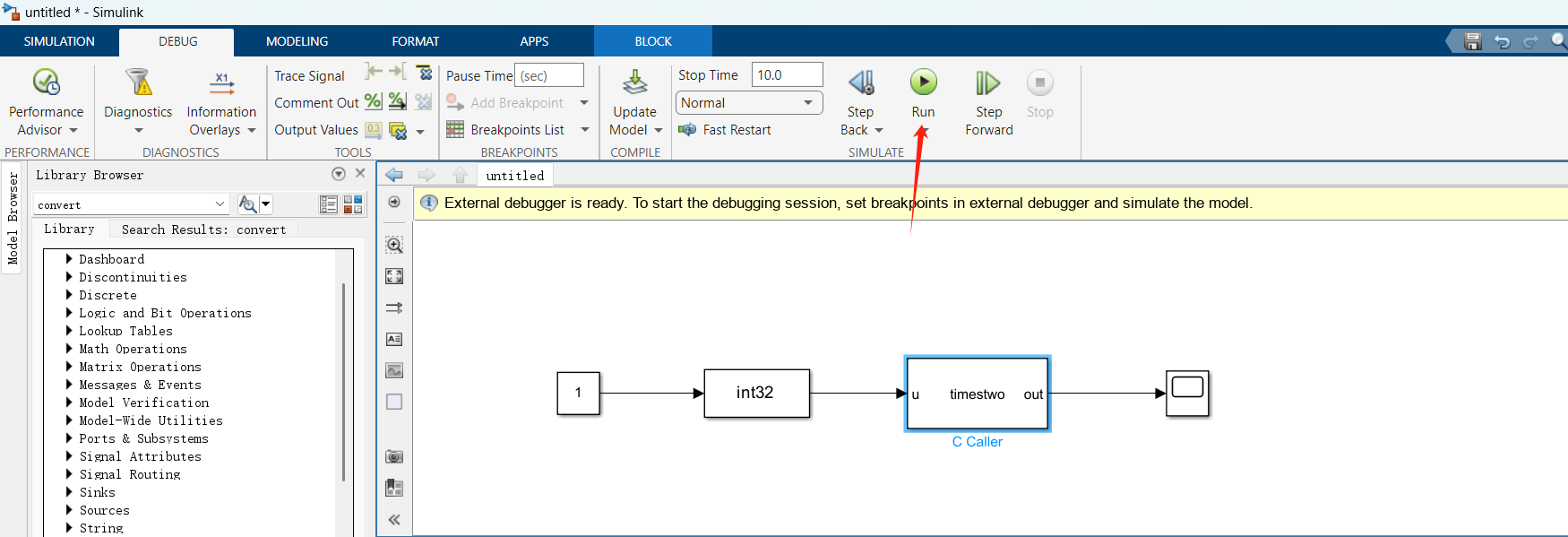
仿真来到断点处。
参考文献
Debug Custom C/C++ Code
MATLAB Coder Interface for Visual Studio Code Debugging - File Exchange - MATLAB Central
Debugging C/C++ code in Simulink » Guy on Simulink - MATLAB & Simulink