(二)Graspnet在mujoco的仿真复现(操作记录)
目录
《复现的项目来源》
一、创建虚拟环境
二、下载manipulator_grasp项目
三、配置环境
1、基于graspnet-baseline项目进行开发
(1)下载 graspnet-baseline项目
(2)修改graspnet-baseline的requirements.txt,再安装
(3)安装torch
2、Compile and install pointnet2 operators (code adapted from votenet)
3、Compile and install knn operator (code adapted from pytorch_knn_cuda)
4、Install graspnetAPI for evaluation
5、提前处理异常
(1)后续运行项目如果出现错误
(2)下载graspnet-baseline的权重
四、运行manipulator_grasp项目
1、额外所需的包
2、执行命令
五、参考链接
《复现的项目来源》
感谢大佬的开源,大佬的开源地址为: manipulator_grasp: manipulator grasp GraspNet
克隆大佬的项目后,按照下面步骤可在自己本地成功复现。
【Python】目标抓取——GraspNet_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV1h2o4Y1EHk/?spm_id_from=333.788.player.player_end_recommend_autoplay&vd_source=27c7aca66453fbf427614cc52d0f156a
https://www.bilibili.com/video/BV1h2o4Y1EHk/?spm_id_from=333.788.player.player_end_recommend_autoplay&vd_source=27c7aca66453fbf427614cc52d0f156a
也可以选择直接clone我的项目(含下面提及的所有项目文件),不用按照下面的步骤一个一个下载项目。
MrQiguan/O_mujoco_Graspnet - Gitee.com![]() https://gitee.com/mrqiguan/o_mujoco_-graspnet/tree/master
https://gitee.com/mrqiguan/o_mujoco_-graspnet/tree/master
一、创建虚拟环境
conda env remove -n mujoco_graspnet
conda create -n mujoco_graspnet python=3.9
conda activate mujoco_graspnet二、下载manipulator_grasp项目
git clone https://gitee.com/chaomingsanhua/manipulator_grasp.git
cd manipulator_grasp三、配置环境
1、基于graspnet-baseline项目进行开发
(1)下载 graspnet-baseline项目
git clone https://github.com/graspnet/graspnet-baseline.git
cd graspnet-baseline
(2)修改graspnet-baseline的requirements.txt,再安装
去掉torch,修改numpy==1.23.4
pip install -r requirements.txt 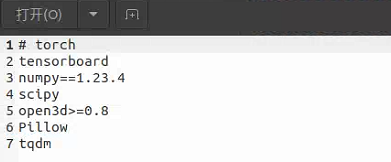
(3)安装torch
重点:这里本文安装的CUDA版本为11.3,不断试错,最终选择torch1.12.1版本(虽然项目要求torch1.6)
查看cuda和torch的关系:Previous PyTorch Versions | PyTorch
pip install torch==1.12.1+cu113 torchvision==0.13.1+cu113 torchaudio==0.12.1 --extra-index-url https://download.pytorch.org/whl/cu1132、Compile and install pointnet2 operators (code adapted from votenet)
cd pointnet2
python setup.py install
cd ../3、Compile and install knn operator (code adapted from pytorch_knn_cuda)
cd knn
python setup.py install
cd ../4、Install graspnetAPI for evaluation
git clone https://github.com/graspnet/graspnetAPI.git修改graspnetAPI的setup.py,将sklearn替换为 scikit-learn,再安装
cd graspnetAPI
pip install .
cd ../ 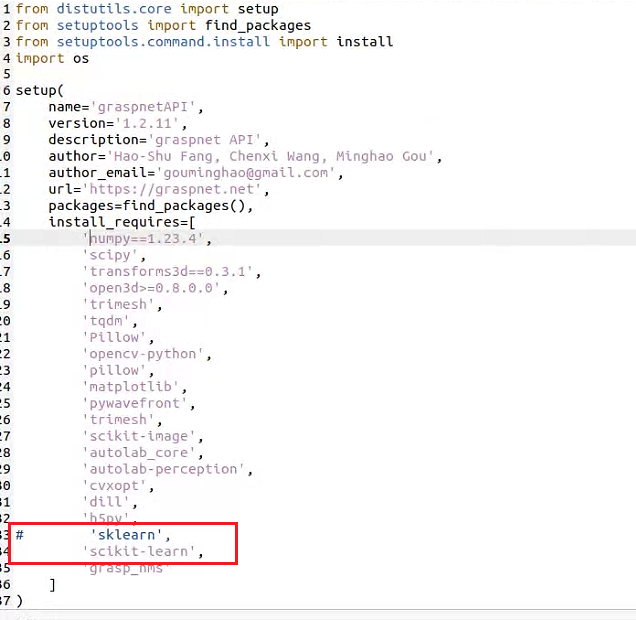
5、提前处理异常
(1)后续运行项目如果出现错误
Traceback (most recent call last): File "/home/song/hjx/manipulator_grasp/main.py", line 19, in <module> from graspnet_dataset import GraspNetDataset File "/home/song/hjx/manipulator_grasp/graspnet-baseline/dataset/graspnet_dataset.py", line 12,https://download.pytorch.org/whl/torch_stable.html ModuleNotFoundError: No module named 'torch._six'。
需要修改graspnet-baseline/dataset/graspnet_dataset.py
# 原代码(旧版PyTorch)
from torch._six import container_abcs
# 修改为(适配PyTorch 2.x)
import collections.abc as container_abcs 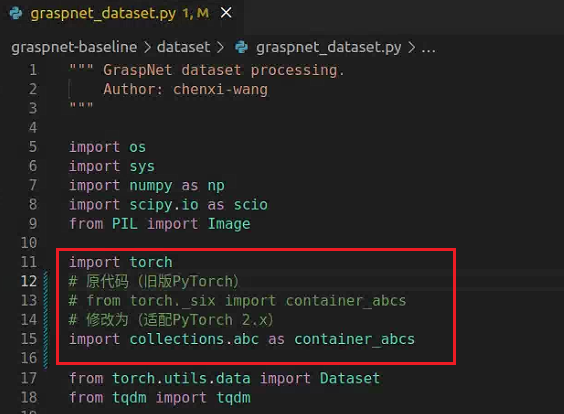
(2)下载graspnet-baseline的权重
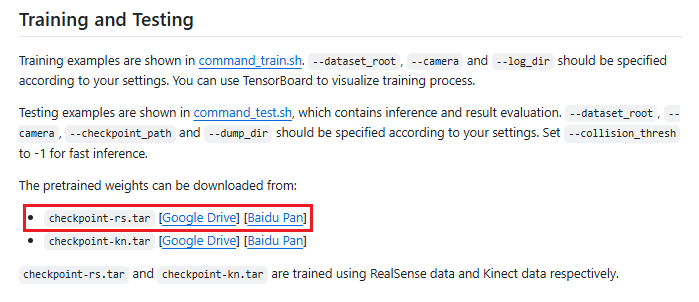
把权重checkpoint-rs.tar放到manipulator_grasp项目的logs/log_rs(需要自己新建这个目录)
四、运行manipulator_grasp项目
1、额外所需的包
pip install spatialmath-python==1.1.14
pip install roboticstoolbox-python==1.1.1
pip install modern-robotics==1.1.1
pip install mujoco==3.3.12、执行命令
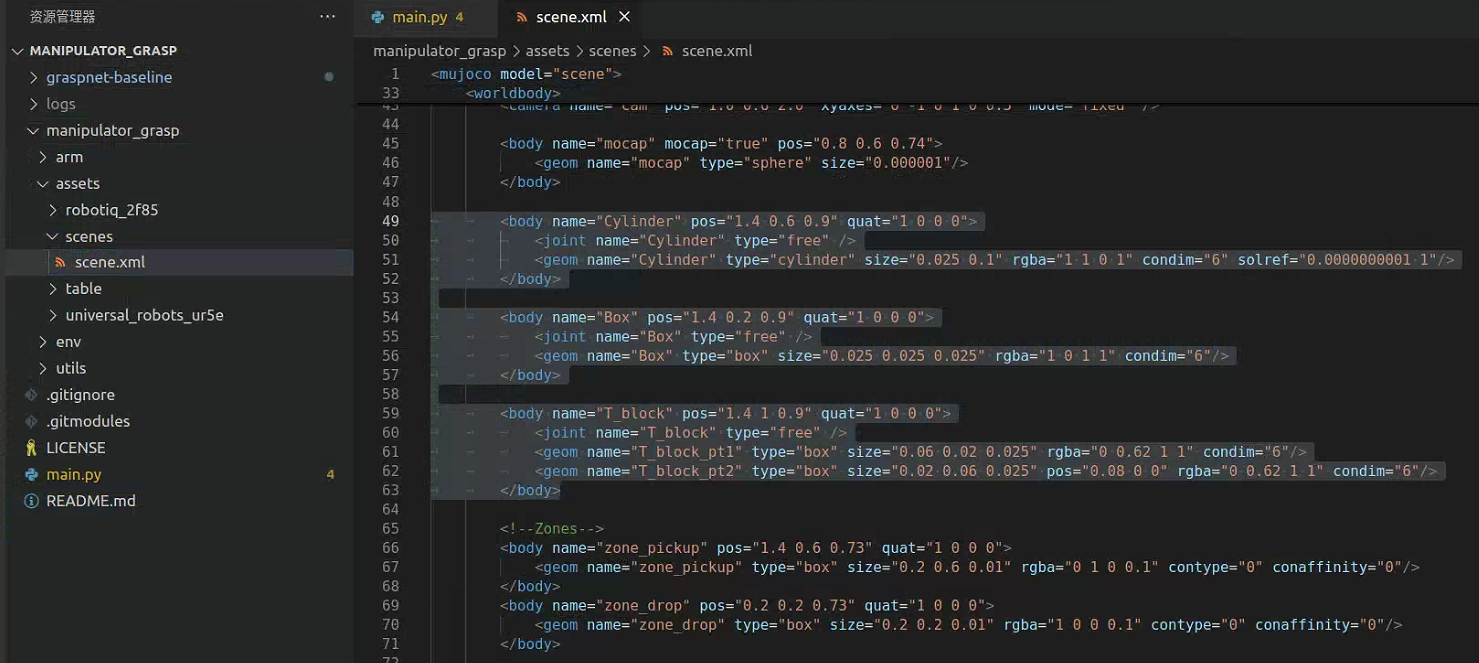
根据视频,修改xml文件后,运行看效果
python main.py./mainpulator_grasp/assets/scenes/scenes.xml。里面有任务:圆柱体、立方体、T形块
五、参考链接
mujoco graspnet 仿真项目的复现记录-CSDN博客![]() https://blog.csdn.net/qq_54900679/article/details/147144922?ops_request_misc=%257B%2522request%255Fid%2522%253A%25226dac2dd8878667370dc34518b58a6e1c%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=6dac2dd8878667370dc34518b58a6e1c&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-4-147144922-null-null.142^v102^control&utm_term=Graspnet%20%E4%BB%BF%E7%9C%9F%E5%A4%8D%E7%8E%B0&spm=1018.2226.3001.4187复现graspnet成功,记录下(大家不懂的地方可以评论区问我)_graspnet复现-CSDN博客
https://blog.csdn.net/qq_54900679/article/details/147144922?ops_request_misc=%257B%2522request%255Fid%2522%253A%25226dac2dd8878667370dc34518b58a6e1c%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=6dac2dd8878667370dc34518b58a6e1c&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-4-147144922-null-null.142^v102^control&utm_term=Graspnet%20%E4%BB%BF%E7%9C%9F%E5%A4%8D%E7%8E%B0&spm=1018.2226.3001.4187复现graspnet成功,记录下(大家不懂的地方可以评论区问我)_graspnet复现-CSDN博客![]() https://blog.csdn.net/m0_49496195/article/details/144539627?ops_request_misc=%257B%2522request%255Fid%2522%253A%25226dac2dd8878667370dc34518b58a6e1c%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=6dac2dd8878667370dc34518b58a6e1c&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-2-144539627-null-null.142^v102^control&utm_term=Graspnet%20%E4%BB%BF%E7%9C%9F%E5%A4%8D%E7%8E%B0&spm=1018.2226.3001.4187【GraspNet复现】-CSDN博客
https://blog.csdn.net/m0_49496195/article/details/144539627?ops_request_misc=%257B%2522request%255Fid%2522%253A%25226dac2dd8878667370dc34518b58a6e1c%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=6dac2dd8878667370dc34518b58a6e1c&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-2-144539627-null-null.142^v102^control&utm_term=Graspnet%20%E4%BB%BF%E7%9C%9F%E5%A4%8D%E7%8E%B0&spm=1018.2226.3001.4187【GraspNet复现】-CSDN博客![]() https://blog.csdn.net/qq_42699973/article/details/139225786?ops_request_misc=%257B%2522request%255Fid%2522%253A%25226dac2dd8878667370dc34518b58a6e1c%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=6dac2dd8878667370dc34518b58a6e1c&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-1-139225786-null-null.142^v102^control&utm_term=Graspnet%20%E4%BB%BF%E7%9C%9F%E5%A4%8D%E7%8E%B0&spm=1018.2226.3001.4187Graspnet手把手复现流程_graspnet复现-CSDN博客
https://blog.csdn.net/qq_42699973/article/details/139225786?ops_request_misc=%257B%2522request%255Fid%2522%253A%25226dac2dd8878667370dc34518b58a6e1c%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=6dac2dd8878667370dc34518b58a6e1c&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-1-139225786-null-null.142^v102^control&utm_term=Graspnet%20%E4%BB%BF%E7%9C%9F%E5%A4%8D%E7%8E%B0&spm=1018.2226.3001.4187Graspnet手把手复现流程_graspnet复现-CSDN博客![]() https://blog.csdn.net/qq_29781367/article/details/144491185?ops_request_misc=&request_id=&biz_id=102&utm_term=Graspnet%20%E4%BB%BF%E7%9C%9F%E5%A4%8D%E7%8E%B0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduweb~default-4-144491185.142^v102^control&spm=1018.2226.3001.4187
https://blog.csdn.net/qq_29781367/article/details/144491185?ops_request_misc=&request_id=&biz_id=102&utm_term=Graspnet%20%E4%BB%BF%E7%9C%9F%E5%A4%8D%E7%8E%B0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduweb~default-4-144491185.142^v102^control&spm=1018.2226.3001.4187