实现在Unity3D中仿真汽车,而且还能使用ros2控制
文章目录
- 前言(Introduction)
- 搭建开发环境(Setup Development Environment)
- 在window中安装Unity(Install Unity in window)
- 创建Docker容器,并安装相关软件(Create Docker containers and install related software)
- 运行测试(Run test)
前言(Introduction)
使用gazebo仿真可以进行机器人与环境交互的仿真,但是仿真环境搭建起来比较复杂,尤其是对于初学者来说,并且难以构建复杂的仿真环境。因此,使用Unity搭建仿真环境会更加简单,并且可以构建更加复杂的仿真环境。
反正我用gazebo有时候挺抓狂的,各种报错😅。
参考:
- docker-ros2-unity-tcp-endpoint
- Robotics-Nav2-SLAM-Example
- unity坐赛车游戏,简单三分钟了解一下
- How to Setup Unity and ROS2 in less than 5 minutes!
- ros2-for-unity
- moveit2_yolobb_ws
- Unity-Robotics-Hub
实现在unity3d中仿真小车,还能用机器人开发框架ros2控制喔
code:https://github.com/laoxue888/DockerRos2UnityCar/tree/main
搭建开发环境(Setup Development Environment)
- Unity:2022
- Ubuntu:24.04
- Ros2:jazzy
在window中安装Unity(Install Unity in window)
先安装Unityhuyb,然后再安装Unity
https://unity.cn/releases
创建Docker容器,并安装相关软件(Create Docker containers and install related software)
❇️创建Docker容器
docker run -it -p 6080:80 -p 10000:10000 -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=host.docker.internal:0.0 --gpus=all --name=Ros2UnityCar docker.1ms.run/ubuntu:24.04 /bin/bash
😂【可选】介绍另外一种方法:借助Docker的网页桌面功能,可以不用安装vncserver。docker-webtop
# 可选
docker run -d --name Ros2UnityCar --security-opt seccomp=unconfined --gpus=all -e PUID=1000 -e PGID=1000 -e TZ="Asia/Shanghai" -p 3000:3000 -p 3001:3001 -p 10000:10000 lscr.io/linuxserver/webtop:ubuntu-xfce # ubuntu:24.04 科学上网下载速度更快# 查看Ubuntu版本的命令
lsb_release -a
❇️安装相关软件
# 按照鱼香ros一键安装ros2
apt-get update
apt install wget -y
wget http://fishros.com/install -O fishros && bash fishros# 打开新的终端,安装gz
sudo apt-get update
sudo apt-get install curl lsb-release gnupg -y
sudo curl https://packages.osrfoundation.org/gazebo.gpg --output /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null
sudo apt-get update -y
sudo apt-get install gz-harmonic -y# 安装远程显示服务程序
apt-get install x11-xserver-utils
apt install libxcb* -y
apt-get install x11-apps -y# 安装moveit
apt install ros-${ROS_DISTRO}-moveit* -y# 安装ros2的控制功能包
sudo apt install ros-${ROS_DISTRO}-controller-manager -y
sudo apt install ros-${ROS_DISTRO}-joint-trajectory-controller -y
sudo apt install ros-${ROS_DISTRO}-joint-state-broadcaster -y
sudo apt install ros-${ROS_DISTRO}-diff-drive-controller -y# 安装其他功能包
# apt install ros-${ROS_DISTRO}-ros-gz -y
apt-get install ros-${ROS_DISTRO}-joint-state-publisher-gui -y
apt install ros-${ROS_DISTRO}-moveit-ros-planning-interface -y
# apt install ros-jazzy-gz-ros2-control 这个很重要 https://github.com/ros-controls/gz_ros2_control
apt install ros-${ROS_DISTRO}-gz-ros2-control -y# 用于调试,可不安装
apt-get install gdb -y# 安装python第三方库
apt install python3-pip -y
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple
pip install pyside6 xacro ultralytics NodeGraphQt --break-system-packages
pip install -U colcon-common-extensions vcstool --break-system-packagespip install pygame --break-system-packages
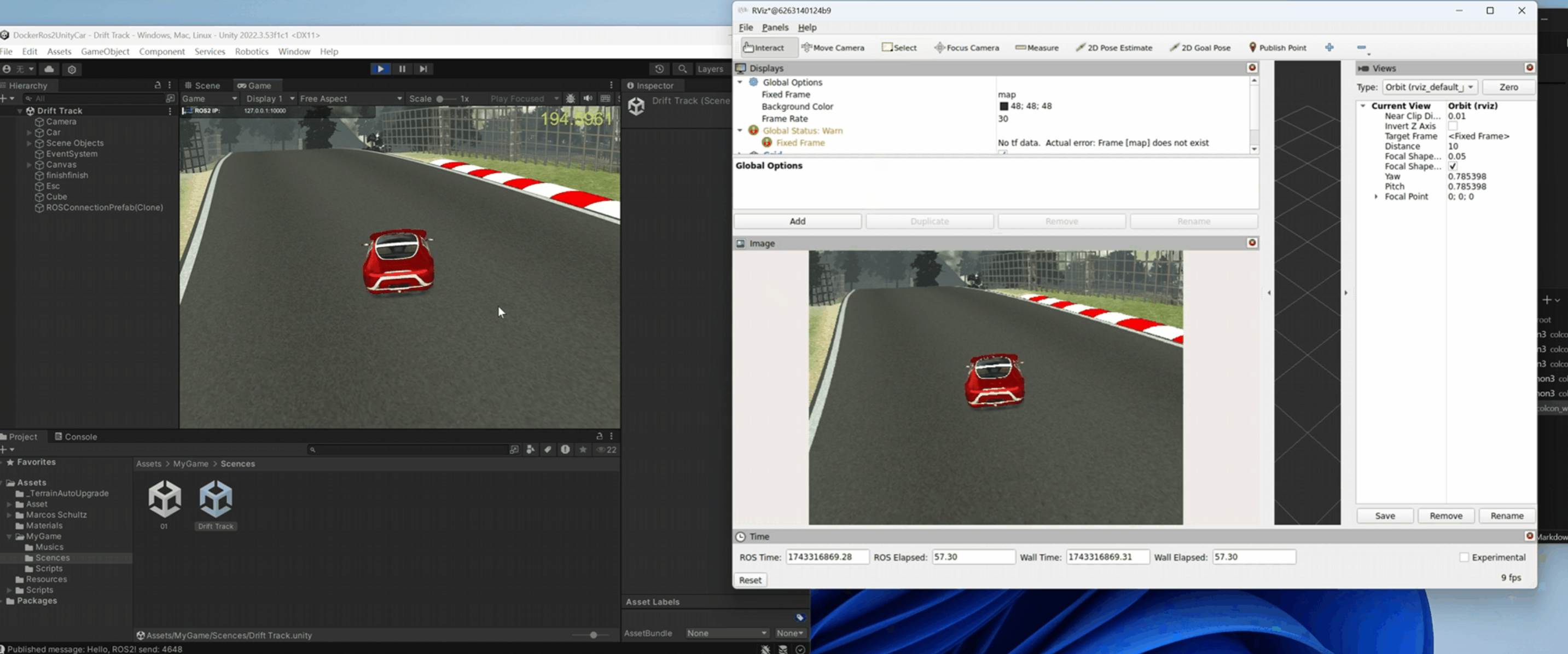
运行测试(Run test)
❇️打开Unity项目


❇️打开ROS2项目
