【动手学强化学习】番外7-MAPPO应用框架2学习与复现
文章目录
- 一、待解决问题
- 1.1 问题描述
- 1.2 解决方法
- 二、方法详述
- 2.1 必要说明
- 2.2 应用步骤
- 2.2.1 搭建基础环境
- 2.2.2 代码复现及结果展示
- 2.2.3 Combat环境介绍
- (1)动作空间
- (2)状态空间
- (3)奖励机制
- (4)终止条件
- 2.2.4 代码框架理解
- 三、疑问
- 四、总结
一、待解决问题
1.1 问题描述
为了在自建环境上使用mappo算法,偶然发现了大佬使用的mappo框架,对其学习理解并复现。
1.2 解决方法
(1)搭建基础环境
(2)代码复现及结果展示
(3)Combat环境介绍
(4)代码框架理解
二、方法详述
2.1 必要说明
此处mappo应用框架的来源为,名为simple_mappo:
【史上最简】300行代码搞定 MAPPO算法原理+代码讲解
Github的源码分享为:
https://github.com/Guowei-Zou/simple_mappo.git
✅非常感谢大佬的分享!!!
2.2 应用步骤
2.2.1 搭建基础环境
基于conda创建虚拟环境,安装torch,并安装框架中实例应用的多智能体环境ma-gym。
具体而言,ma-gym的源码为:
https://github.com/koulanurag/ma-gym
其中,对于gym版本和pip、setuptools、wheel版本有要求。
conda create -n simple_mappo python=3.11
conda activate simple_mappopip install pip==24.0
pip install setuptools==65.5.0
pip install wheel==0.38.4pip3 install torch torchvision torchaudio
pip install tqdm
conda install matplotlib
将ma-gym源码下载到本地后
cd ma-gym-master/
pip install -e .
conda list | grep gym
conda list | grep ma-gym
conda install spyder
查询gym和ma-gym的版本分别为:0.20.0,0.0.14
2.2.2 代码复现及结果展示
打开python 的IDE(这里选用spyder),将simple_mappo 的源码运行。
import os
import shutil
from time import sleep
import torch
import torch.nn.functional as F
import numpy as np
from tqdm import tqdm
import matplotlib.pyplot as plt
import sys
#sys.path.append("./ma-gym-master")
from ma_gym.envs.combat.combat import Combat# 清空日志文件和绘图文件夹
log_file = "training_log_metrics_weight.txt"
plot_dir = "plots_metrics_weight"if os.path.exists(log_file):open(log_file, "w").close()if os.path.exists(plot_dir):shutil.rmtree(plot_dir)
os.makedirs(plot_dir)# 日志记录函数
def log_message(message):with open(log_file, "a") as f:f.write(message + "\n")def plot_all_metrics(metrics_dict, episode):"""将所有指标绘制到一个包含多个子图的图表中- 对曲线进行平滑处理- 添加误差带显示参数:metrics_dict: 包含所有指标数据的字典,格式为 {metric_name: values_list}episode: 当前的episode数"""# 创建一个2x3的子图布局fig, axes = plt.subplots(2, 3, figsize=(18, 10))fig.suptitle(f'Training Metrics (Up to Episode {episode})', fontsize=16)# 压平axes数组以便迭代axes = axes.flatten()# 为每个指标获取x轴值any_metric = list(metrics_dict.values())[0]x_values = [50 * (i + 1) for i in range(len(any_metric))]# 平滑参数 - 窗口大小window_size = min(5, len(x_values)) if len(x_values) > 0 else 1# 在每个子图中绘制一个指标for i, (metric_name, values) in enumerate(metrics_dict.items()):if i >= 5: # 我们只有5个指标breakax = axes[i]values_array = np.array(values)# 应用平滑处理if len(values) > window_size:# 创建平滑曲线smoothed = np.convolve(values_array, np.ones(window_size)/window_size, mode='valid')# 计算滚动标准差用于误差带std_values = []for j in range(len(values) - window_size + 1):std_values.append(np.std(values_array[j:j+window_size]))std_values = np.array(std_values)# 调整x轴以匹配平滑后的数据长度smoothed_x = x_values[window_size-1:]# 绘制平滑曲线和原始散点ax.plot(smoothed_x, smoothed, '-', linewidth=2, label='Smoothed')ax.scatter(x_values, values, alpha=0.3, label='Original')# 添加误差带ax.fill_between(smoothed_x, smoothed-std_values, smoothed+std_values, alpha=0.2, label='±1 StdDev')else:# 如果数据点太少,只绘制原始数据ax.plot(x_values, values, 'o-', label='Data')ax.set_title(metric_name.replace('_', ' '))ax.set_xlabel('Episodes')ax.set_ylabel(metric_name.replace('_', ' '))ax.grid(True, alpha=0.3)ax.legend()# 删除未使用的子图if len(metrics_dict) < 6:fig.delaxes(axes[5])plt.tight_layout(rect=[0, 0, 1, 0.95])plt.savefig(os.path.join(plot_dir, f'training_metrics.png'))plt.close(fig)def compute_entropy(probs):dist = torch.distributions.Categorical(probs)return dist.entropy().mean().item()def compute_advantage(gamma, lmbda, td_delta):td_delta = td_delta.detach().cpu().numpy()advantage_list = []advantage = 0.0for delta in td_delta[::-1]:advantage = gamma * lmbda * advantage + deltaadvantage_list.append(advantage)advantage_list.reverse()return torch.tensor(advantage_list, dtype=torch.float)# 策略网络(Actor)
class PolicyNet(torch.nn.Module):def __init__(self, state_dim, hidden_dim, action_dim):super(PolicyNet, self).__init__()self.fc1 = torch.nn.Linear(state_dim, hidden_dim)self.fc2 = torch.nn.Linear(hidden_dim, hidden_dim)self.fc3 = torch.nn.Linear(hidden_dim, action_dim)def forward(self, x):x = F.relu(self.fc2(F.relu(self.fc1(x))))return F.softmax(self.fc3(x), dim=1)# 全局价值网络(CentralValueNet)
# 输入: 所有智能体的状态拼接 (team_size * state_dim)
# 输出: 对每个智能体的价值估计 (team_size维向量)
class CentralValueNet(torch.nn.Module):def __init__(self, total_state_dim, hidden_dim, team_size):super(CentralValueNet, self).__init__()self.fc1 = torch.nn.Linear(total_state_dim, hidden_dim)self.fc2 = torch.nn.Linear(hidden_dim, hidden_dim)self.fc3 = torch.nn.Linear(hidden_dim, team_size) # 输出为每个智能体一个价值def forward(self, x):x = F.relu(self.fc2(F.relu(self.fc1(x))))return self.fc3(x) # [batch, team_size]class MAPPO:def __init__(self, team_size, state_dim, hidden_dim, action_dim,actor_lr, critic_lr, lmbda, eps, gamma, device):self.team_size = team_sizeself.gamma = gammaself.lmbda = lmbdaself.eps = epsself.device = device# 为每个智能体一个独立的actorself.actors = [PolicyNet(state_dim, hidden_dim, action_dim).to(device)for _ in range(team_size)]# 一个全局critic,输入为所有智能体状态拼接self.critic = CentralValueNet(team_size * state_dim, hidden_dim, team_size).to(device)self.actor_optimizers = [torch.optim.Adam(actor.parameters(), actor_lr) for actor in self.actors]self.critic_optimizer = torch.optim.Adam(self.critic.parameters(), critic_lr)def save_model(self, path="mappo_weights"):if not os.path.exists(path):os.makedirs(path)for i, actor in enumerate(self.actors):torch.save(actor.state_dict(), os.path.join(path, f"actor_{i}.pth"))torch.save(self.critic.state_dict(), os.path.join(path, "critic.pth"))def load_model(self, path="mappo_weights"):for i, actor in enumerate(self.actors):actor_path = os.path.join(path, f"actor_{i}.pth")if os.path.exists(actor_path):actor.load_state_dict(torch.load(actor_path))critic_path = os.path.join(path, "critic.pth")if os.path.exists(critic_path):self.critic.load_state_dict(torch.load(critic_path))def take_action(self, state_per_agent):# state_per_agent: list of shape [team_size, state_dim]actions = []action_probs = []for i, actor in enumerate(self.actors):s = torch.tensor([state_per_agent[i]], dtype=torch.float).to(self.device)probs = actor(s)action_dist = torch.distributions.Categorical(probs)action = action_dist.sample()actions.append(action.item())action_probs.append(probs.detach().cpu().numpy()[0])return actions, action_probsdef update(self, transition_dicts, state_dim):# 拼接所有智能体的数据,用于全局critic# 首先统一长度T,假设所有智能体长度相同(因为同步环境步)T = len(transition_dicts[0]['states'])# print(f"T: {T}")# 将所有智能体在同一时间步的state拼接起来,得到 [T, team_size*state_dim]states_all = []next_states_all = []for t in range(T):concat_state = []concat_next_state = []for i in range(self.team_size):concat_state.append(transition_dicts[i]['states'][t])concat_next_state.append(transition_dicts[i]['next_states'][t])states_all.append(np.concatenate(concat_state))next_states_all.append(np.concatenate(concat_next_state))states_all = torch.tensor(states_all, dtype=torch.float).to(self.device) # [T, team_size*state_dim]next_states_all = torch.tensor(next_states_all, dtype=torch.float).to(self.device) # [T, team_size*state_dim]rewards_all = torch.tensor([ [transition_dicts[i]['rewards'][t] for i in range(self.team_size)] for t in range(T)], dtype=torch.float).to(self.device) # [T, team_size]dones_all = torch.tensor([ [transition_dicts[i]['dones'][t] for i in range(self.team_size)] for t in range(T)], dtype=torch.float).to(self.device) # [T, team_size]# 从critic计算价值和TD-targetvalues = self.critic(states_all) # [T, team_size] next_values = self.critic(next_states_all) # [T, team_size]td_target = rewards_all + self.gamma * next_values * (1 - dones_all) # [T, team_size]td_delta = td_target - values # [T, team_size]# 为每个智能体计算其优势advantages = []for i in range(self.team_size):adv_i = compute_advantage(self.gamma, self.lmbda, td_delta[:, i])advantages.append(adv_i.to(self.device)) # [T]# 更新critic# critic的loss是所有智能体的均方误差平均critic_loss = F.mse_loss(values, td_target.detach())self.critic_optimizer.zero_grad()critic_loss.backward()self.critic_optimizer.step()# 更新每个智能体的actoraction_losses = []entropies = []for i in range(self.team_size):states = torch.tensor(transition_dicts[i]['states'], dtype=torch.float).to(self.device)actions = torch.tensor(transition_dicts[i]['actions']).view(-1, 1).to(self.device)old_probs = torch.tensor(transition_dicts[i]['action_probs'], dtype=torch.float).to(self.device)current_probs = self.actors[i](states) # [T, action_dim]log_probs = torch.log(current_probs.gather(1, actions))old_log_probs = torch.log(old_probs.gather(1, actions)).detach()ratio = torch.exp(log_probs - old_log_probs)surr1 = ratio * advantages[i].unsqueeze(-1)surr2 = torch.clamp(ratio, 1 - self.eps, 1 + self.eps) * advantages[i].unsqueeze(-1)action_loss = torch.mean(-torch.min(surr1, surr2))entropy_val = compute_entropy(current_probs)self.actor_optimizers[i].zero_grad()action_loss.backward()self.actor_optimizers[i].step()action_losses.append(action_loss.item())entropies.append(entropy_val)return np.mean(action_losses), critic_loss.item(), np.mean(entropies)# 参数设置
actor_lr = 3e-4
critic_lr = 1e-3
total_episodes = 1000
hidden_dim = 64
gamma = 0.99
lmbda = 0.97
eps = 0.3
team_size = 2
grid_size = (20, 20)
device = torch.device("cuda:0") if torch.cuda.is_available() else torch.device("cpu")# 创建环境
env = Combat(grid_shape=grid_size, n_agents=team_size, n_opponents=team_size)
state_dim = env.observation_space[0].shape[0]
action_dim = env.action_space[0].n# 创建MAPPO智能体(共有team_size个actor, 一个共享critic)
mappo = MAPPO(team_size, state_dim, hidden_dim, action_dim, actor_lr, critic_lr, lmbda, eps, gamma, device)# 用于统计指标的列表
total_rewards_per_episode = []
episode_lengths = []
policy_losses = []
value_losses = []
entropies = []# 每50个episode的平均值列表
avg_total_rewards_per_50 = []
avg_episode_length_per_50 = []
avg_policy_loss_per_50 = []
avg_value_loss_per_50 = []
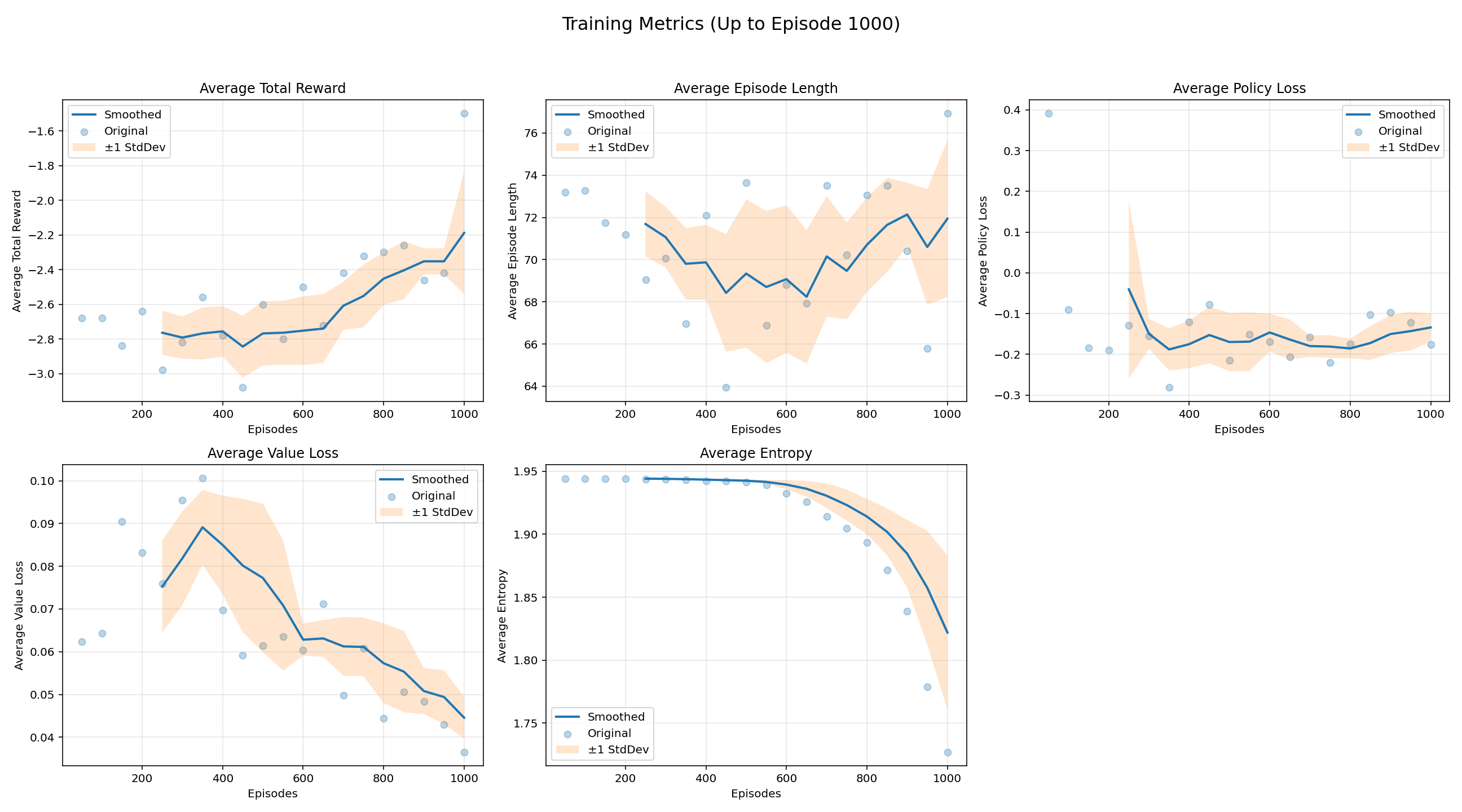
avg_entropy_per_50 = []with tqdm(total=total_episodes, desc="Training") as pbar:for episode in range(1, total_episodes + 1):# 初始化Trajectory bufferbuffers = [{'states': [], 'actions': [], 'next_states': [], 'rewards': [], 'dones': [], 'action_probs': []} for _ in range(team_size)]s = env.reset()terminal = Falseepisode_reward = 0.0steps = 0while not terminal:steps += 1# MAPPO中,每个智能体仍独立选择动作,但critic共享actions, prob_dists = mappo.take_action(s)next_s, r, done, info = env.step(actions)# 累计总奖励step_reward = sum(r)episode_reward += step_reward# 存储transitionfor i in range(team_size):buffers[i]['states'].append(np.array(s[i]))buffers[i]['actions'].append(actions[i])buffers[i]['next_states'].append(np.array(next_s[i]))buffers[i]['rewards'].append(r[i])buffers[i]['dones'].append(float(done[i]))buffers[i]['action_probs'].append(prob_dists[i])s = next_sterminal = all(done)# 使用MAPPO更新参数a_loss, c_loss, ent = mappo.update(buffers, state_dim)# 记录指标total_rewards_per_episode.append(episode_reward)episode_lengths.append(steps)policy_losses.append(a_loss)value_losses.append(c_loss)entropies.append(ent)# 保存模型的权重参数if episode % 500 == 0:mappo.save_model()log_message(f"Model saved at episode {episode}")# 每50个episode统计一次平均值并记录日志、绘图if episode % 50 == 0:avg_reward_50 = np.mean(total_rewards_per_episode[-50:])avg_length_50 = np.mean(episode_lengths[-50:])avg_policy_loss_50 = np.mean(policy_losses[-50:])avg_value_loss_50 = np.mean(value_losses[-50:])avg_entropy_50 = np.mean(entropies[-50:])avg_total_rewards_per_50.append(avg_reward_50)avg_episode_length_per_50.append(avg_length_50)avg_policy_loss_per_50.append(avg_policy_loss_50)avg_value_loss_per_50.append(avg_value_loss_50)avg_entropy_per_50.append(avg_entropy_50)log_message(f"Episode {episode}: "f"AvgTotalReward(last50)={avg_reward_50:.3f}, "f"AvgEpisodeLength(last50)={avg_length_50:.3f}, "f"AvgPolicyLoss(last50)={avg_policy_loss_50:.3f}, "f"AvgValueLoss(last50)={avg_value_loss_50:.3f}, "f"AvgEntropy(last50)={avg_entropy_50:.3f}")# 创建指标字典metrics_dict = {"Average_Total_Reward": avg_total_rewards_per_50,"Average_Episode_Length": avg_episode_length_per_50,"Average_Policy_Loss": avg_policy_loss_per_50,"Average_Value_Loss": avg_value_loss_per_50, "Average_Entropy": avg_entropy_per_50}# 调用新的绘图函数plot_all_metrics(metrics_dict, episode)pbar.update(1)最终绘制的结果图如下:
2.2.3 Combat环境介绍
在ma-gym的Combat环境中,目标是模拟两个队伍在15×15的网格上进行对抗。每个队伍由5个智能体组成,智能体的初始位置在队伍中心附近的5×5区域内随机分布。智能体可以通过移动、攻击或不行动来与敌方互动。
(在RL领域中,环境仿真都是基于MDP而言的,包含状态空间、动作空间、状态转移函数、奖励函数四项重要内容,因此理解一个RL环境就可以从以下4个方面出发)
(1)动作空间
每个智能体有以下动作选项:
- 移动:在四个方向(上、下、左、右)中选择一个方向移动一格。
- 攻击:攻击范围内的敌方智能体(3×3的区域)。
- 不行动:不执行任何操作。
补充说明:
- 攻击action是指定agent ID来执行的。
- agent无法攻击视野范围外的agent,agent视野范围为以自身为中心的5x5的范围。
- 一个队伍的agent是共享视野的。(默认有通信机制)
(2)状态空间
每个智能体的状态由以下信息组成:
- 唯一ID
- 队伍ID
- 位置
- 生命值(初始为3点)
- 攻击冷却状态
补充说明:
- 一个队伍有5个agent,初始位置以一个agent为中心,周围的5×5正方形区域内均匀采样。
- 攻击冷却的含义为:执行攻击action后,下一个time step需“不行动”。
(3)奖励机制
- 如果队伍输掉或平局,模型会获得-1的奖励。
- 此外,模型还会根据敌方队伍的生命值总和获得-0.1倍的奖励,这鼓励模型积极攻击敌方。
补充说明:
- 模型可以控制己方agent的策略。
- 敌方agent都采用“既定规则”策略:如果最近的敌方智能体在其射程范围内,则攻击它;如果不是,则接近视觉范围内的最近可见敌方智能体。
(4)终止条件
- 一方队伍的所有智能体死亡。
- 在40个时间步内未分出胜负(平局)。
2.2.4 代码框架理解
三、疑问
- 暂无
四、总结
- (后续补充)