ubuntu20.04在mid360部署direct_lidar_odometry(DLO)
editor:1034Robotics-yy
time:2025.4.10
1.下载DLO,mid360需要的一些...:
1.1 在工作空间/src下 下载DLO:
git clone https://github.com/vectr-ucla/direct_lidar_odometry1.2 在工作空间/src下 下载livox_ros_driver2:
git clone https://github.com/Livox-SDK/livox_ros_driver21.3 在系统全局(主文件夹) 下载Livox-SDK2:
git clone https://github.com/Livox-SDK/Livox-SDK22.Livox-SDK2配置:
2.1下载,安装

3.livox_ros_driver2以及ip配置:
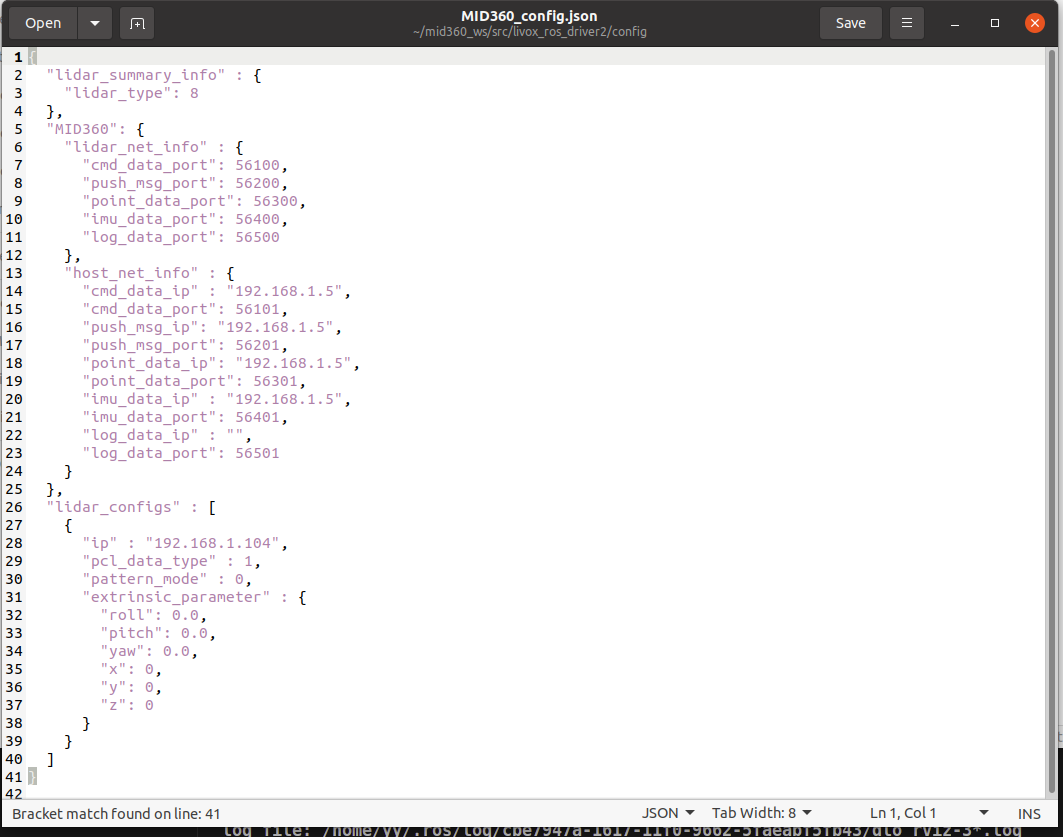
改在livox_ros_driver2里面的config:
(上下保持一致即可)
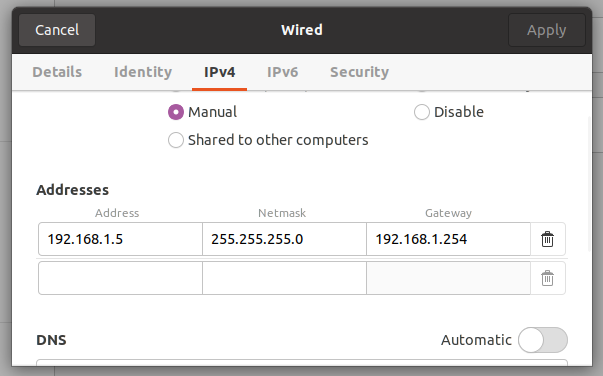
ip部分参考:Ubuntu 20.04使用Livox Mid-360 - 技术栈参考文章:Ubuntu 20.04使用Livox mid 360 测试 FAST_LIO-CSDN博客![]() https://jishuzhan.net/article/1738794897495822338
https://jishuzhan.net/article/1738794897495822338
4.修改DLO以及命令运行:
4.1.DLO修改话题名称imu,lidar(在dlo.launch里面)
4.2.ros_driver2:(不要用msg_MID360!!!!)
roslaunch livox_ros_driver2 rviz_MID360.launch4.3.dlo:
roslaunch direct_lidar_odometry dlo.launch4.4 rviz的frame改成livox_frame
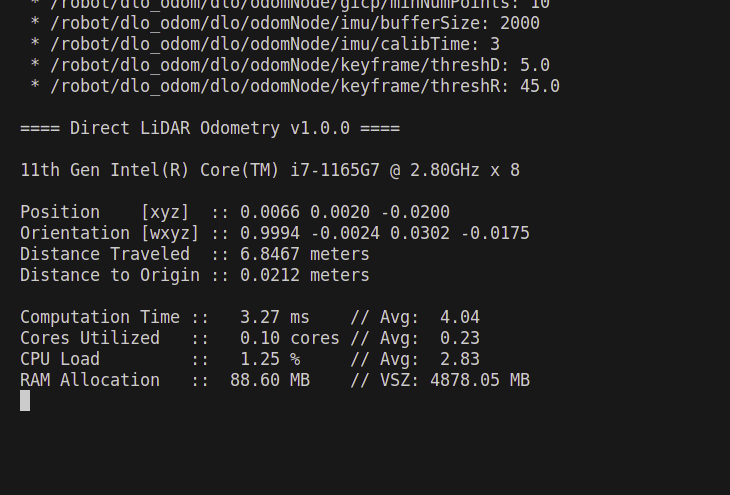
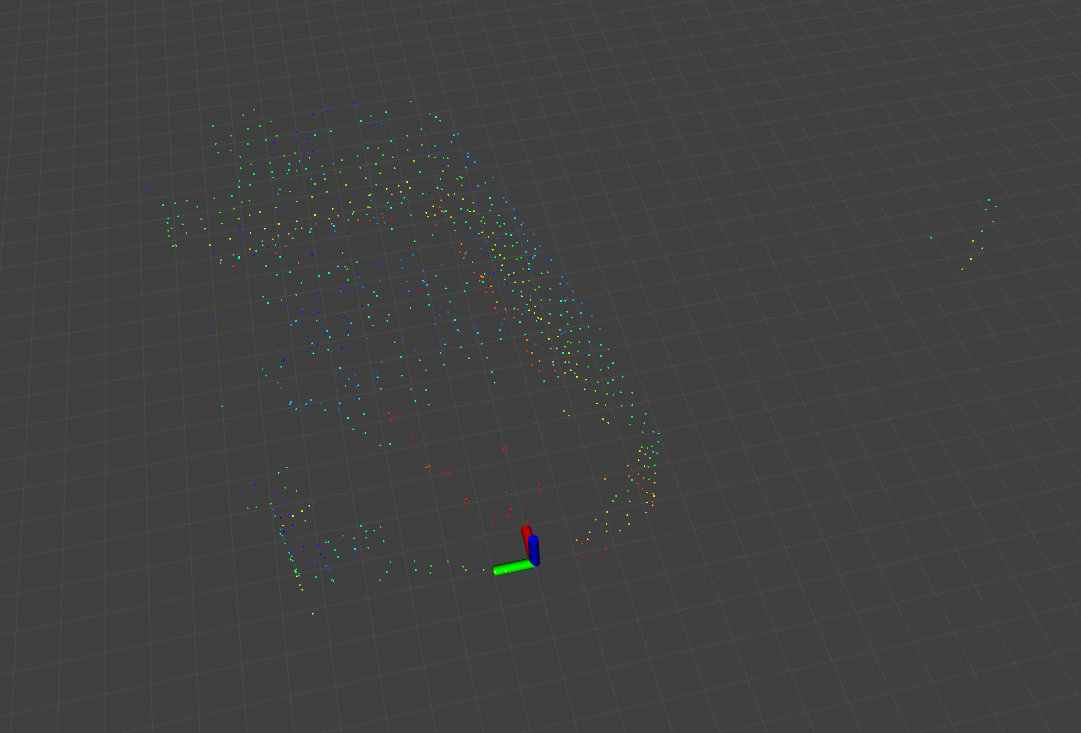
5.结果展示: