move_base
move_base 官方介绍:http://wiki.ros.org/move_base

如果在仿真环境下, sensor source、odometry source 和 sensor transforms 都已提供好,我们只需要完成以下部分:
一、编写导航程序

①创建 ROS 工作空间 和 pkg 包
mkdir -p catkin_ws/src
cd catkin_ws/src
catkin_create_pkg nav_pkg roscpp rospy move_base_msgs actionlib②在 pkg 中创建 nav.launch 文件,其中包含了上面介绍的3个节点。
<launch><!--- Run move_base --><node pkg="move_base" type="move_base" name="move_base"><rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" /><rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" /><param name="base_global_planner" value="global_planner/GlobalPlanner" /> <param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" /></node><!-- Run map server --><node pkg="map_server" type="map_server" name="map_server" args="$(find wpr_simulation)/maps/map.yaml"/><!--- Run AMCL --><node pkg="amcl" type="amcl" name="amcl"/><!--- Run rviz --><node name="rviz" pkg="rviz" type="rviz" args="-d $(find wpr_simulation)/rviz/nav.rviz"/>
</launch>
③编译工作空间
二、 运行导航程序
①运行仿真环境
roslaunch wpr_simulation wpb_stage_robocup.launch②运行 nav.launch 文件
roslaunch nav_pkg nav.launch③打开 rviz
④添加 Map(话题: /map);Path(话题:/move_base/GlobalPlanner/plan)
其中运行 nav.launch 文件产生的话题如下:
1、map_server 产生的话题
/map
- 说明:发布静态地图数据,通常为
nav_msgs/OccupancyGrid类型。 - 来源:由
map_server节点生成,用于全局路径规划。
/map_metadata
- 说明:发布地图的元数据信息,如地图的分辨率、宽度、高度和原点位置。通常为 nav_msgs/MapMetaData 类型
- 来源:由
map_server节点生成,辅助其他节点理解地图的结构和坐标系

2、amcl 产生的话题
/amcl_pose
- 说明:发布
amcl计算出的机器人在地图中的位姿,通常为geometry_msgs/PoseWithCovarianceStamped类型。 - 来源:由
amcl节点生成,用于定位和导航。

/initialpose
- 说明:用于设置机器人的初始位姿,通常通过
rviz手动发布该话题。通常为 geometry_msgs/PoseWithCovarianceStamped 类型 - 来源:由用户或
rviz发布,用于amcl节点初始化机器人位置。
/diagnostics
- 说明:发布系统诊断信息,包括节点状态、传感器健康状况等,通常为
diagnostic_msgs/DiagnosticArray类型。 - 来源:由
amcl节点生成,用于监控和调试系统状态

/particlecloud
- 说明:发布粒子滤波器的粒子分布,可以在 rviz 中可视化。通常为
geometry_msgs/PoseArray类型。 - 来源:由
amcl节点生成,用于可视化粒子滤波器的状态。

/amcl/parameter_descriptions 和 /amcl/parameter_updates
- 说明:用于动态参数调整(dynamic reconfigure),允许在运行时修改
amcl的参数。前者通常为 dynamic_reconfigure/ConfigDescription 类型;后者为 dynamic_reconfigure/Config 类型。 - 来源:由
amcl节点生成,支持参数的动态管理。
3、move_base 产生的话题
3.1 move_base 的总体控制和状态
/move_base/current_goal
- 说明:发布当前的导航目标,通常为
geometry_msgs/PoseStamped类型。 - 来源:由
move_base节点生成,表示当前正在执行的目标。
/move_base/goal 和 /move_base_simple/goal
- 说明:
/move_base/goal:用于接收复杂的导航目标,通常为move_base_msgs/MoveBaseActionGoal类型。/move_base_simple/goal:用于接收简化的导航目标,通常通过rviz发布,类型为geometry_msgs/PoseStamped。
- 来源:由用户通过
rviz或其他工具发布,用于设置导航目标。
/move_base/recovery_status
- 说明:发布导航恢复行为的状态信息,如避障操作的执行情况。通常为 move_base_msgs/RecoveryStatus 类型。
- 来源:由
move_base节点生成,用于监控恢复行为。
/move_base/cancel
- 说明:用于取消当前的导航目标,通常为
actionlib_msgs/GoalID类型。 - 来源:由用户或其他节点发布,用于终止当前导航任务。
/move_base/feedback
- 说明:发布导航过程中的实时反馈信息,通常为
move_base_msgs/MoveBaseActionFeedback类型。 - 来源:由
move_base节点生成,用于监控导航进展。
/move_base/result 和 /move_base/status
- 说明:
/move_base/result:发布导航结果,通常为move_base_msgs/MoveBaseActionResult类型。/move_base/status:发布当前导航的状态,通常为actionlib_msgs/GoalStatusArray类型。
- 来源:由
move_base节点生成,用于反馈导航任务的完成情况和状态。
/move_base/parameter_descriptions 和 /move_base/parameter_updates
- 说明:用于动态调整
move_base节点的整体参数。 - 来源:由
move_base节点生成,支持参数的动态管理。
3.2全局规划器(Global Planner)
/move_base/GlobalPlanner/parameter_descriptions 和 /move_base/GlobalPlanner/parameter_updates
- 说明:用于动态调整全局规划器的参数。
- 来源:由
move_base的全局规划器(如GlobalPlanner)生成,支持参数的动态管理。前者通常为 dynamic_reconfigure/ConfigDescription 类型;后者为 dynamic_reconfigure/Config 类型。
/move_base/GlobalPlanner/plan
- 说明:发布全局规划路径的坐标点,通常为
nav_msgs/Path类型。 - 来源:由
GlobalPlanner生成,用于展示全局路径。
/move_base/GlobalPlanner/potential
- 说明:发布潜在场(potential field)地图,用于全局路径规划的成本计算。通常为 nav_msgs/OccupancyGrid 类型。
- 来源:由
GlobalPlanner生成,辅助路径规划。
3.3局部规划器(Local Planner)
/move_base/WpbhLocalPlanner/local_planner_target
- 说明:发布局部规划的目标点,通常为
geometry_msgs/PoseStamped类型。 - 来源:由
WpbhLocalPlanner生成,用于局部路径调整。
3.4全局代价地图(Global Costmap)
/move_base/global_costmap/costmap 和 /move_base/global_costmap/costmap_updates
- 说明:发布全局代价地图及其更新数据,通常为
nav_msgs/OccupancyGrid和map_msgs/OccupancyGridUpdate类型。 - 来源:由
move_base的全局代价地图生成,辅助全局路径规划。
/move_base/global_costmap/footprint
- 说明:发布机器人轮廓信息,通常为
geometry_msgs/PolygonStamped类型。 - 来源:由
move_base全局代价地图生成,用于计算安全代价区域。
/move_base/global_costmap/inflation_layer/parameter_descriptions 和 /move_base/global_costmap/inflation_layer/parameter_updates
- 说明:用于膨胀层的动态调参,用于障碍物周围的安全缓冲区设置。
- 来源:由
move_base的膨胀层生成,增加障碍物周围的安全缓冲区。
/move_base/global_costmap/obstacle_layer/parameter_descriptions 和 /move_base/global_costmap/obstacle_layer/parameter_updates
- 说明:用于动态障碍物图层的动态调参。
- 来源:由
move_base的障碍物层生成,处理动态障碍物信息。
/move_base/global_costmap/static_layer/parameter_descriptions 和 /move_base/global_costmap/static_layer/parameter_updates
- 说明:用于静态图层的动态调参。
- 来源:由
move_base的静态层生成,处理静态障碍物和背景地图。
/move_base/global_costmap/parameter_descriptions 和 /move_base/global_costmap/parameter_updates
- 说明:用于调整全局代价地图的整体参数。
- 来源:由
move_base全局代价地图生成,支持参数的动态管理。
3.5局部代价地图(Local Costmap)
/move_base/local_costmap/costmap 和 /move_base/local_costmap/costmap_updates
- 说明:发布局部代价地图及其更新数据,通常为
nav_msgs/OccupancyGrid和map_msgs/OccupancyGridUpdate类型。 - 来源:由
move_base的局部代价地图生成,辅助局部路径规划。
/move_base/local_costmap/footprint
- 说明:发布机器人轮廓信息,通常为
geometry_msgs/PolygonStamped类型。 - 来源:由
move_base局部代价地图生成,用于计算安全代价区域。
/move_base/local_costmap/inflation_layer/parameter_descriptions 和 /move_base/local_costmap/inflation_layer/parameter_updates
- 说明:用于膨胀层的动态调参,用于障碍物周围的安全缓冲区设置。
- 来源:由
move_base的膨胀层生成,增加障碍物周围的安全缓冲区。
/move_base/local_costmap/obstacle_layer/parameter_descriptions 和 /move_base/local_costmap/obstacle_layer/parameter_updates
- 说明:用于动态障碍物图层的动态调参。
- 来源:由
move_base的障碍物层生成,处理动态障碍物信息。
/move_base/local_costmap/parameter_descriptions 和 /move_base/local_costmap/parameter_updates
- 说明:用于调整局部代价地图的整体参数。
- 来源:由
move_base局部代价地图生成,支持参数的动态管理。
三、move_bose 节点参数解析
<!--- Run move_base --><node pkg="move_base" type="move_base" name="move_base"><rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" /><rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" /><param name="base_global_planner" value="global_planner/GlobalPlanner" /> <param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" /></node>
1、全局规划器
官方介绍:global_planner - ROS Wiki
1.1 广度优先算法 BFS(Dijkstra算法)

1.2 深度优先算法 DFS(A*)

1.3 move_base 中的全局规划器

move_base 共有 3 个全局规划器,默认使用 Navfn规划器。其中前两个规划器中均包含 Dijkstra算法 和 A*算法,都默认使用 Dijkstra算法,但 Navfn规划器中的 A*算法存在 Bug。

若想使用 Global_planner规划器 中的 A*算法,需要加上如下代码:
<!-- 使用 GlobalPlanner规划器 中的 A*算法 -->
<param name="GlobalPlanner/use_dijkstra" value="false" />
<param name="GlobalPlanner/use_grid_path" value="true" />Carrot_planner规划器:从起始点到目标点延伸一条路径,遇到障碍物就停止。代码简单,经常被用来作为自定义规划器的模版进行修改。

1.4 自定义规划器
move_base 支持自己编写自定义全局规划器,提供了一种 Plugin 插件接口,只要按照特定的格式,就能把自己的路径规划算法编写成新的规划器,加载到 move_base 节点中使用。


2、AMCL (Adaptive Mentcarto Localization)自适应蒙特卡罗定位算法
官方介绍:amcl - ROS Wiki
AMCL:使用粒子滤波在已知地图中进行定位的算法。同时使用了 里程计 和 激光雷达数据,具有较强的自我纠错功能。rviz 中添加 PoseArray 订阅话题 /particlecloud 可查看 AMCL 产生的粒子。

AMCL参数:
<launch>
<node pkg="amcl" type="amcl" name="amcl" output="screen"><!-- Publish scans from best pose at a max of 10 Hz --><!-- 机器人的运动模型为差动驱动模型,即机器人只能前后运动和原地旋转,无法侧向移动。 --><param name="odom_model_type" value="diff"/><!-- 机器人的运动模型为全向运动模型,允许机器人在平面上向任何方向移动。 --><param name="odom_model_type" value="omni"/><param name="odom_alpha5" value="0.1"/><param name="transform_tolerance" value="0.2" /><param name="gui_publish_rate" value="10.0"/><param name="laser_max_beams" value="30"/><!-- 粒子滤波的粒子数 --><param name="min_particles" value="50"/><param name="max_particles" value="500"/><param name="kld_err" value="0.05"/><param name="kld_z" value="0.99"/><param name="odom_alpha1" value="0.2"/><param name="odom_alpha2" value="0.2"/><!-- translation std dev, m --><param name="odom_alpha3" value="0.8"/><param name="odom_alpha4" value="0.2"/><param name="laser_z_hit" value="0.5"/><param name="laser_z_short" value="0.05"/><param name="laser_z_max" value="0.05"/><param name="laser_z_rand" value="0.5"/><param name="laser_sigma_hit" value="0.2"/><param name="laser_lambda_short" value="0.1"/><param name="laser_lambda_short" value="0.1"/><param name="laser_model_type" value="likelihood_field"/><!-- <param name="laser_model_type" value="beam"/> --><param name="laser_likelihood_max_dist" value="2.0"/><param name="update_min_d" value="0.2"/><param name="update_min_a" value="0.5"/><param name="odom_frame_id" value="odom"/><param name="resample_interval" value="1"/><param name="transform_tolerance" value="0.1"/><param name="recovery_alpha_slow" value="0.0"/><param name="recovery_alpha_fast" value="0.0"/>
</node>
</launch>
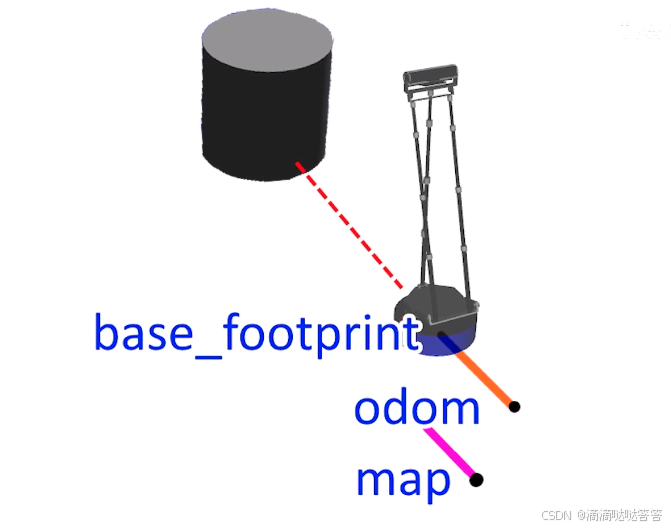
其中 AMCL 负责输出 map 到 odom 的 tf ;里程计负责输出 odom 到 base_frame 的 tf 。从而形成完整的 map 到 base_frame 的 tf。

注意:AMCL 切换本体和分身是在 map 到 odom 这段的 tf 上产生跳跃突变来实现的,所以在导航过程中会看到机器人位置跳变,这就是 AMCL 输出的这段 tf 突变产生的结果;而里程计输出的 odom 到 base_frame 这段 tf 通常是保持连续变化的,不会突然跳变(这个特征在生成代价地图时会用到)。
3、代价地图
官方介绍:costmap_2d - ROS Wiki
<!-- 代价地图参数 -->
<!-- 通过 命名空间 ns 实现了用一个文件给全局和局部两个代价地图设置一样的参数,参数是关于代价地图的形状的 -->
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" />
<!-- 代价地图的计算范围和频率 -->
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" />
3.1 代价地图的形状参数
robot_radius: 0.25 # 机器人底盘半径
inflation_radius: 0.5 # 膨胀区域的半径
obstacle_range: 6.0 # 激光雷达障碍物检测距离,单位 m
raytrace_range: 6.0 # 清除动态障碍物的残留影子
observation_sources: base_lidar # 障碍物的观测来源,与下文保持一致# 观测来源的数据参数
base_lidar: {data_type: LaserScan, # 消息的类型topic: /scan, # 话题名称marking: true, # 是否将扫描到的障碍物添加到代价地图clearing: true # 是否清除扫描范围内的障碍物残影}



3.2 全局代价地图的计算范围和频率参数
global_costmap:global_frame: map # 地图坐标系名称robot_base_frame: base_footprint # 底盘坐标系名称static_map: true # 是否将 map_server 发来的地图数据作为初始代价地图update_frequency: 1.0 # 地图更新频率,单位 hzpublish_frequency: 1.0 # 地图发布频率,单位 hztransform_tolerance: 1.0 # transform 延迟容忍值,单位 s。如出现 tf 的 timeout 错误,调大该值。其中 transform 指的是 传感器 到 map 的 tf ,包含 3 段

3.3局部代价地图的计算范围和频率参数
local_costmap:global_frame: odom # 地图坐标系名称robot_base_frame: base_footprint # 底盘坐标系名称static_map: false # 是否将 map_server 发来的地图数据作为初始代价地图rolling_window: true # 局部代价地图是否和底盘一起移动width: 3.0 # 代价地图的宽度,单位 mheight: 3.0update_frequency: 10.0 # 局部代价地图的更新频率,一般和激光雷达的扫描频率保持一致publish_frequency: 10.0 # 局部代价地图的发布频率transform_tolerance: 1.0这里的 global_frame 设置为 odom 而不是 map,原因是 AMCL 是通过 map 到 odom 这段的 tf 的跳变来切换机器人和分身的位置的,如果以 map 为基准坐标系,当机器人的位置跳变时,传感器检测到的障碍物位置也会跳变,这对于全局路径规划来说问题不大,但对于局部路径规划来说,会使机器人运动变得不平稳。所以局部代价地图的 global_frame 通常会设置为 odom。