动、静态创建任务
任务创建和删除API函数

xTaskCreat() 、vTaskDelete()函数
1.start_task: 用来创建其他两个任务 ,当此任务运行以后会调用删除任务vTaskDelete()
2.task1_task: 普通应用任务,实现LED2闪烁并用串口打印执行次数
3.task2_task: 普通应用任务,实现LED3闪烁并用串口打印执行次数
下面是动态创建任务代码示例:
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "FreeRTOS.h"
#include "task.h"//开始任务
#define START_TASK_SIZE 120 //堆栈大小
#define START_TASK_PRIO 1 //任务优先级
TaskHandle_t StartTask_Hender; //任务句柄
void start_task( void * pvParameters ); //开始函数//任务1
#define TASK1_TASK_SIZE 120
#define TASK1_TASK_PRIO 2
TaskHandle_t Task1Task_Hender;
void task1_task( void * pvParameters ); //任务2
#define TASK2_TASK_SIZE 120
#define TASK2_TASK_PRIO 3
TaskHandle_t Task2Task_Hender;
void task2_task( void * pvParameters ); int main(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组 delay_init(); //延时函数初始化 uart_init(115200); //串口初始化LED_Init(); //LED初始化xTaskCreate( (TaskFunction_t) start_task,(char *) "start_task", (configSTACK_DEPTH_TYPE) START_TASK_SIZE,(void *) NULL,(UBaseType_t) START_TASK_PRIO,(TaskHandle_t *) &StartTask_Hender);vTaskStartScheduler(); //开启任务调度
}void start_task( void * pvParameters )
{//Task1xTaskCreate( (TaskFunction_t) task1_task,//任务函数(char *) "task1_task", //任务名(configSTACK_DEPTH_TYPE) TASK1_TASK_SIZE,//任务堆栈大小(void *) NULL, //传递给任务函数的参数(UBaseType_t) TASK1_TASK_PRIO,//任务优先级(TaskHandle_t *) &Task1Task_Hender);//任务句柄//Task2xTaskCreate( (TaskFunction_t) task2_task,(char *) "task2_task", (configSTACK_DEPTH_TYPE) TASK2_TASK_SIZE,(void *) NULL,(UBaseType_t) TASK2_TASK_PRIO,(TaskHandle_t *) &Task2Task_Hender);vTaskDelete(StartTask_Hender);//删除开始函数 }
//任务1函数
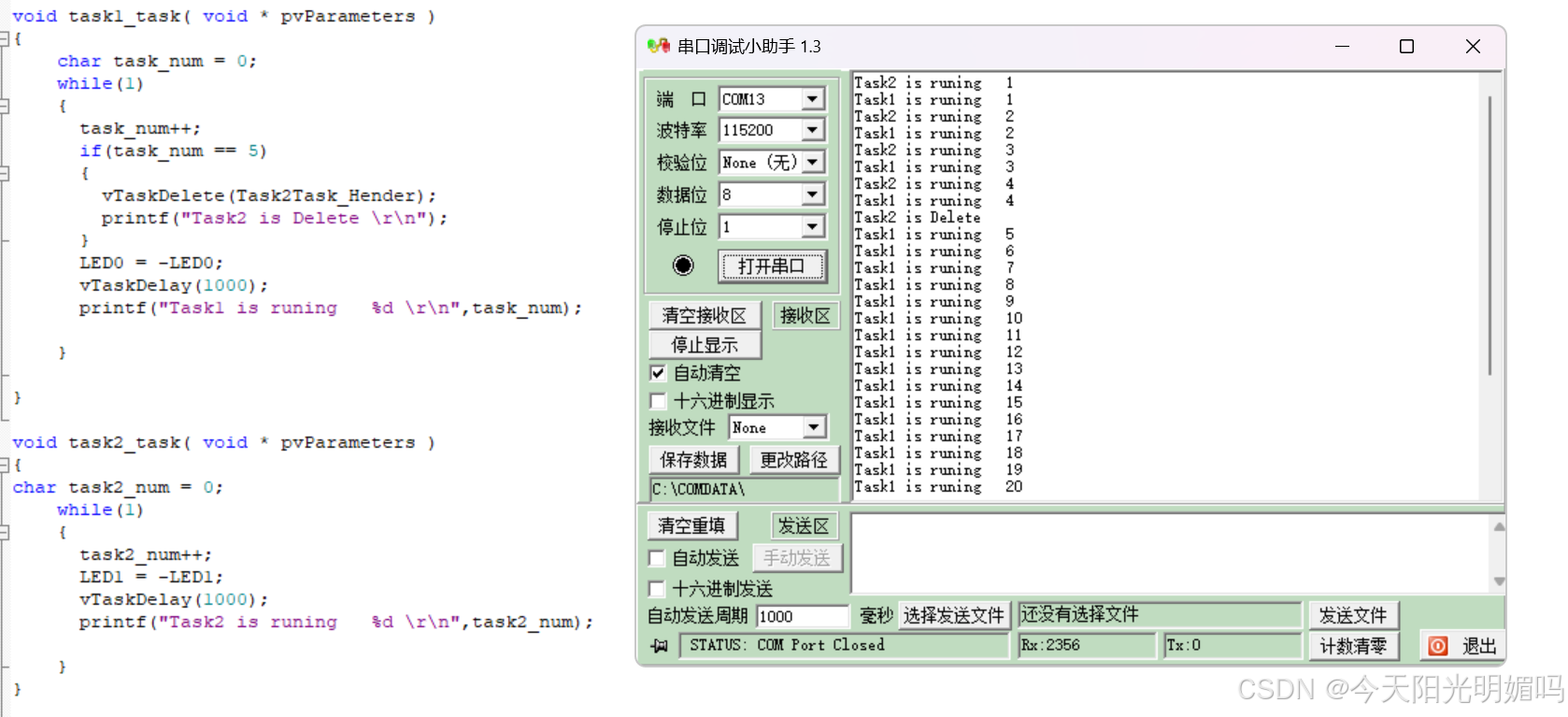
void task1_task( void * pvParameters )
{char task_num = 0;while(1){task_num++;if(task_num == 5){vTaskDelete(Task2Task_Hender);//当任务1执行5次删除任务2printf("Task2 is Delete \r\n");}LED2 = !LED2;vTaskDelay(1000);printf("Task1 is runing %d \r\n",task_num);//串口打印任务1执行次数}}
//任务2函数
void task2_task( void * pvParameters )
{char task2_num = 0;while(1){task2_num++;LED3 = !LED3;vTaskDelay(1000);printf("Task2 is runing %d \r\n",task2_num);//串口打印任务2执行次数}
}用串口验证函数的执行:
如果要使用静态方法需要将宏 ConfigSUPPORT_STATIC_ALLOCATION 设置为1
1.start_task: 用来创建两个任务
2.task1_task: 普通应用任务,实现LED2闪烁并用串口打印执行次数
3.task2_task: 普通应用任务,实现LED3闪烁并用串口打印执行次数
1.静态内存分配的要求
FreeRTOS 默认使用动态内存分配(从堆中分配任务栈和任务控制块TCB)。当启用 静态内存分配(通过configSUPPORT_STATIC_ALLOCATIO N=1)时,用户需自行提供任务所需的内存空间(栈和TCB),否则内核无法运行。
2.系统任务的特殊性
·空闲任务(IdleTask):FreeRTOS 必须的空闲任务,用于清理已删除的任务和进入低功耗模式。
·定时器任务(TimerTask):如果启用软件定时器(configUSE_TIMERS =1),系统需要一个专用任务处理定时器回调。
这两个任务是FreeRTOS 内核的“基础设施”,用户需为它们显式分配静态内存。
步骤:
1.修改宏 , ConfigSUPPORT_STATIC_ALLOCATION = 1
有两个函数未定义,给函数定义:
①.vApplicationGetIdleTaskMemory 给空闲任务分配内存 ②.vApplicationGetTimerTaskMemory 给定时器任务分配内存
2.编写测试代码 开始任务 框架
task1 task2 框架
测试
下面是静态创建任务代码:
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "FreeRTOS.h"
#include "task.h"//开始任务
#define START_TASK_SIZE 120//堆栈大小
#define START_TASK_PRIO 1//任务优先级
StackType_t StartTaskStack[START_TASK_SIZE];//任务堆栈
StaticTask_t StartTask_TCB;//任务控制块
TaskHandle_t StartTask_Handle;//任务句柄
void start_task( void * pvParameters );//开始函数声明//任务1
#define TASK1_TASK_SIZE 120
#define TASK1_TASK_PRIO 3
StackType_t Task1TaskStack[TASK1_TASK_SIZE];
StaticTask_t Task1Task_TCB;
TaskHandle_t Task1Task_Handle;
void task1_task( void * pvParameters );//任务2
#define TASK2_TASK_SIZE 120
#define TASK2_TASK_PRIO 2
StackType_t Task2TaskStack[TASK2_TASK_SIZE];
StaticTask_t Task2Task_TCB;
TaskHandle_t Task2Task_Handle;
void task2_task( void * pvParameters );//空闲任务
static StaticTask_t IdleTaskTCB;
static StackType_t IdleTaskStack[configMINIMAL_STACK_SIZE];void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,StackType_t ** ppxIdleTaskStackBuffer,uint32_t * pulIdleTaskStackSize ){*ppxIdleTaskTCBBuffer = &IdleTaskTCB;*ppxIdleTaskStackBuffer = IdleTaskStack;*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;}//定时器任务
static StaticTask_t TimerTaskTCB;
static StackType_t TimerTaskStack[configTIMER_TASK_STACK_DEPTH];void vApplicationGetTimerTaskMemory( StaticTask_t ** ppxTimerTaskTCBBuffer,StackType_t ** ppxTimerTaskStackBuffer,uint32_t * pulTimerTaskStackSize ){* ppxTimerTaskTCBBuffer = &TimerTaskTCB;* ppxTimerTaskStackBuffer = TimerTaskStack;*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;}int main(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4); delay_init(); uart_init(115200); LED_Init(); StartTask_Handle = xTaskCreateStatic( (TaskFunction_t) start_task,//任务函数(char * ) "start_task", //函数名(uint32_t) START_TASK_SIZE,//堆栈大小(void *) NULL,//传递给任务函数的参数(UBaseType_t) START_TASK_PRIO,//任务优先级(StackType_t *) StartTaskStack,//任务堆栈(StaticTask_t *) &StartTask_TCB );//任务控制块vTaskStartScheduler();//开启任务调度
}void start_task( void * pvParameters )
{while(1){//任务1Task1Task_Handle = xTaskCreateStatic( (TaskFunction_t) task1_task,(char * ) "task1_task", (uint32_t) TASK1_TASK_SIZE,(void *) NULL,(UBaseType_t) TASK1_TASK_PRIO,(StackType_t *) Task1TaskStack,(StaticTask_t *) &Task1Task_TCB );//任务2 Task2Task_Handle = xTaskCreateStatic( (TaskFunction_t) task2_task,(char * ) "task2_task", (uint32_t) TASK2_TASK_SIZE,(void *) NULL,(UBaseType_t) TASK2_TASK_PRIO,(StackType_t *) Task2TaskStack,(StaticTask_t *) &Task2Task_TCB );vTaskDelete(StartTask_Handle);//删除开始函数}}
//任务1
void task1_task( void * pvParameters )
{char Task1_num = 0;
while(1)
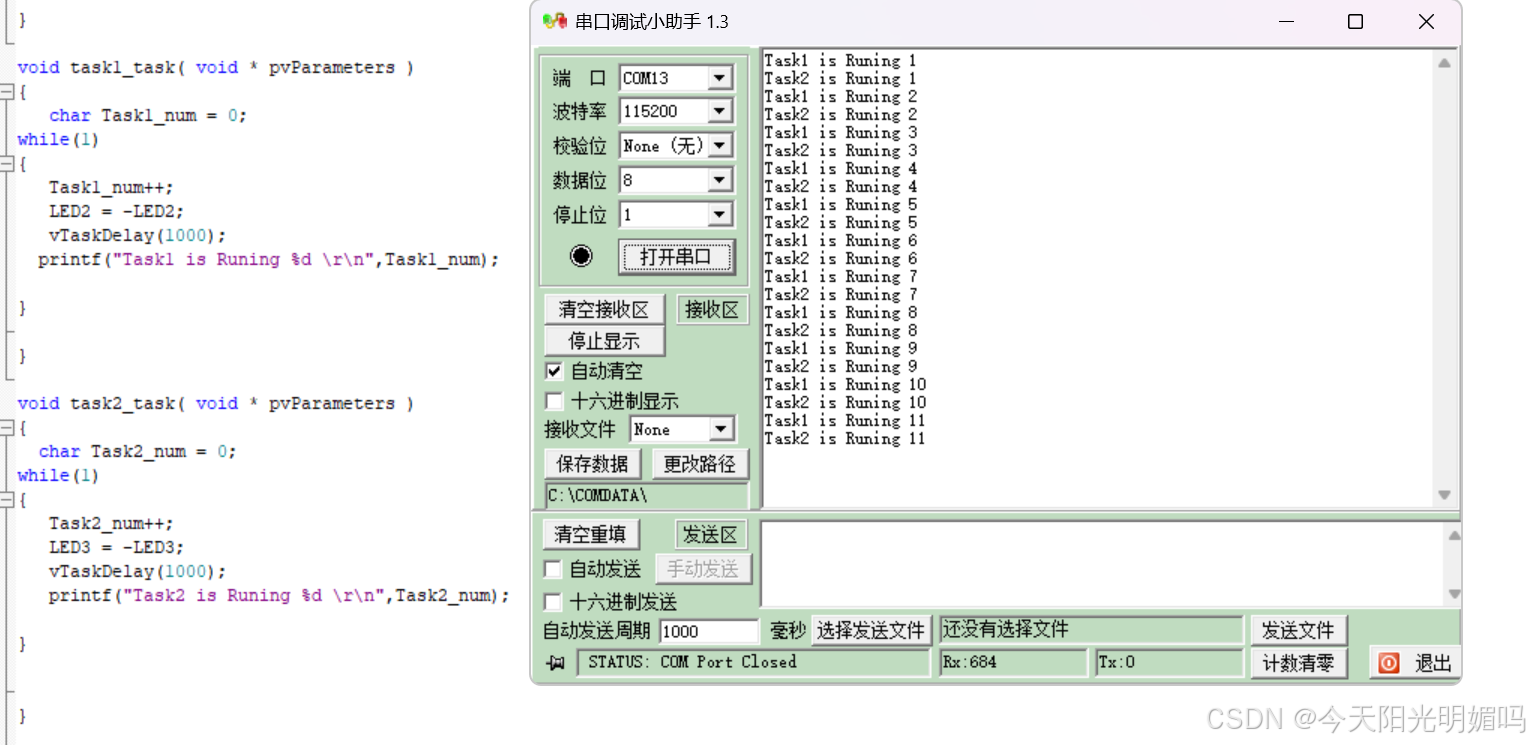
{Task1_num++;LED2 = !LED2;vTaskDelay(1000);printf("Task1 is Runing %d \r\n",Task1_num);//打印任务1执行次数}}
//任务2
void task2_task( void * pvParameters )
{ char Task2_num = 0;
while(1)
{Task2_num++;LED3 = !LED3;vTaskDelay(1000);printf("Task2 is Runing %d \r\n",Task2_num);//打印任务2执行次数}}串口打印: