Bench4Merge:一个提升自动驾驶车辆在复杂交通场景中并车能力的综合性评估平台。
2024-10-21,由清华大学人工智能产业研究院(AIR)提出的Bench4Merge数据集,目的通过大规模数据集训练的车辆模型来增强评估自动驾驶车辆在高密度交通中合并场景的复杂性和多样性,为自动驾驶领域提供了一个更为真实和全面的评估工具。
一、研究背景:
随着自动驾驶技术的发展,自动驾驶车辆在高密度交通中的合并操作仍然是一个重大挑战。尽管已经提出了许多运动规划方法,但现有的封闭循环模拟器依赖于基于规则的控制,缺乏多样性和随机性,无法准确评估在高度交互场景中的运动规划能力。此外,传统的评估指标不足以全面评估在高密度交通中合并的性能。
目前遇到困难和挑战:
1、缺乏能够准确反映环境现实性和交互性的初始场景生成方法。
2、现有模拟器中周围车辆的运动规划过于简化,无法模拟真实世界中的微观交互行为。
3、现有的评估指标单一,无法全面评估算法在安全性、效率和舒适性方面的综合表现。
数据集地址:Bench4Merge|自动驾驶数据集|车辆合并数据集
二、让我们一起来看一下Bench4Merge
Bench4Merge是一个针对高密度交通中合并场景的综合性评估基准测试,它通过大规模数据集训练的车辆模型来增强评估的复杂性和多样性。包含了从真实世界中提取并分类的初始场景,以及基于这些场景训练的周围车辆模型,这些模型能够展现出微观层面的交互特征。此外,该数据集还利用大型语言模型(LLMs)来评估自动驾驶车辆的合并过程。
数据集构建 :
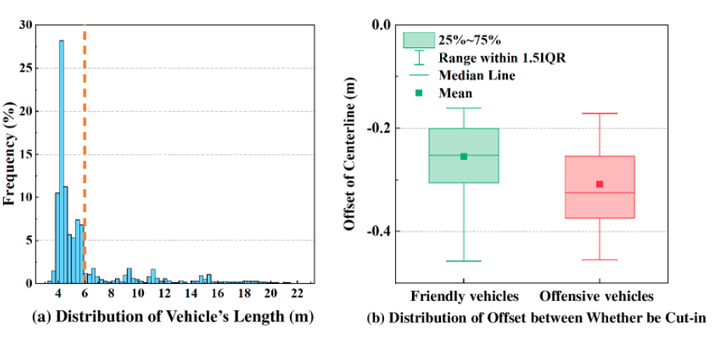
基于DJI Dense Traffic Dataset,nuPlan和ExiD数据集,通过分析和分类车辆的交互行为,将车辆分为三种类型:长车、攻击性车辆和友好车辆。每个训练样本包括目标车辆和其他车辆的状态,以及地图信息。
数据集特点:
能够提供真实且多样化的初始场景,训练出能够展现微观交互特征的车辆模型,并通过LLMs进行综合性评估。
用户可以通过访问Bench4Merge的开源项目,使用其中的环境和车辆运动规划模型进行算法评估和优化。
基准测试 :
Bench4Merge提供了一个闭环评估机制,通过模拟高密度交通中的合并场景,评估现有方法的性能,并识别常见问题。
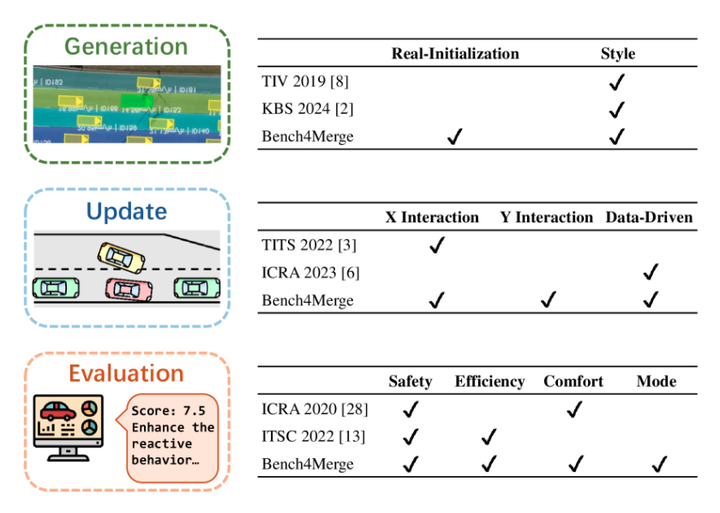
闭环基准测试:“Real-Initialization” 表示初始场景是从真实数据中提取的;“Style” 代表不同的车辆风格;“X Interaction” 和 “Y Interaction” 分别表示车辆的横向和纵向位移;“Safe.”、“Effi.”和“Comf.”表示安全、效率和舒适度三个评价指标;“Mode” 表示车辆模式hurry、medium、relax

我们的架构概述。Bench4Merge 由三个主要部分组成:场景级生成、主干道车辆微可控模型和LLM 评估。在这种情况下,合并策略是指被评估的合并车辆的规划方法。

我们将其他车辆在每个 init 环境中的平均速度和平均距离分布分为三类。
数据集分析

每个样本都包括目标车辆和其他车辆的状态,以及地图信息。其他车辆是所有落在目标车辆的 Leading 和 interaction 范围内的车辆。

LLM 的评估器
三、让我们一起展望Bench4Merge应用场景
Bench4Merge就像是为这些自动驾驶车辆准备的一个虚拟驾校。
接下来让我们走进虚拟驾校:
比如,我们的自动驾驶车辆小七,正在Bench4Merge的虚拟世界里接受训练。今天,它要学习如何在高速公路上处理一些棘手的并线情况。
急性子司机的挑战:
突然,小七遇到了一个急性子司机,我们叫他“暴脾气”。暴脾气的车就像是装了喷气引擎一样,总是急匆匆地想超过每一个挡在他前面的车。小七得学会怎么和这种司机打交道。
在模拟训练中,每当小七准备并线时,暴脾气就会突然加速,似乎是在挑衅:“你来啊,看你敢不敢并过来。”小七通过Bench4Merge的指导,学会了保持冷静,它不会被暴脾气的挑衅所影响。相反,小七会等待一个安全的时机,比如当暴脾气因为前面的慢车不得不减速时,小七就抓住机会,平稳而安全地并入车道。Bench4Merge给了小七一个大大的赞:“太棒了,保持冷静,把握时机!”
悠闲司机的耐心测试:
接下来,小七遇到了“悠闲哥”。悠闲哥开车就像是在公园里散步,总是不紧不慢的。在高速公路上,这种驾驶风格有时候会让后面的车辆排成长龙。
在Bench4Merge的虚拟场景中,小七学会了如何礼貌地向悠闲哥发出并线信号。小七先是打开了转向灯,然后稍微加速,向悠闲哥表明了自己想要并线的意图。悠闲哥看到小白的信号后,很绅士地减速让出了空间。小七顺利并线,Bench4Merge又给了它一个好评:“干得漂亮,沟通很重要!”
大型车辆的威慑感:
最后,小七遇到了“巨无霸”——一辆巨大的卡车,它几乎占据了整个车道。对于小七这样的小车来说,巨无霸的存在无疑是一种压力。
在Bench4Merge的训练中,小七学会了如何在这个大家伙旁边安全驾驶。它知道不能紧跟在巨无霸后面,因为那会挡住它的视线,也让巨无霸难以注意到它。所以,小七要么保持一个安全的距离,要么在合适的时机加速超过去。当小七成功处理这些情况时,Bench4Merge鼓励它说:“没错,保持距离,注意视野,做得很好!”
通过这些模拟训练,小七变得越来越机智和果断。它学会了不仅要关注自己的驾驶,还要留意周围的车辆,预测他们可能的行为,并做出相应的反应。当小七最终真正上路时,它已经准备好成为一个真正的“老司机”了。而这一切都要感谢Bench4Merge这个虚拟驾校,它让小七在安全的环境中学会了如何处理真实世界中的各种驾驶挑战。
来吧,让我们走进:Bench4Merge|自动驾驶数据集|车辆合并数据集