CANFD技术在实时运动控制系统中的应用:协议解析、性能测试与未来发展趋势
摘要: 本文深入探讨了CANFD技术在实时运动控制系统中的应用。通过对传统CAN协议与CANFD协议的对比分析,详细阐述了CANFD在提升数据传输效率、增强系统实时性与稳定性方面的优势。文章结合具体测试案例,对CANFD总线的性能指标进行了全面评估,并分析了当前技术应用中的挑战与未来发展趋势。研究表明,CANFD技术凭借其技术特性,在实时运动控制系统中展现出巨大潜力,且随着技术演进与融合,其应用前景将更为广阔。
关键词:CANFD;实时运动控制;性能测试;发展趋势
一、引言
在自动化领域,实时运动控制系统对于通信协议的要求极为严苛,既要保障数据的高速传输,又要确保系统的稳定与精准。CANFD(Controller Area Network with Flexible Data-rate)技术应运而生,它在传统CAN协议基础上进行了显著优化,极大地提升了数据传输速率与单帧数据容量,为解决实时运动控制系统中的通信瓶颈问题提供了有效途径。
二、CANFD协议解析
(一)传统CAN协议的局限
传统CAN协议自诞生以来,在汽车电子、工业自动化等领域广泛应用,但其局限性也逐渐暴露。一方面,传统CAN协议规定每帧数据最多仅能携带8个字节,对于复杂的运动控制指令与多参数传输而言,数据量明显不足;另一方面,其最大数据传输速率被限制在1Mbps,在多节点、高频数据交互的实时运动控制系统中,这一速率难以满足系统对实时性的要求。
(二)CANFD的关键改进
数据传输速率的提升 CANFD技术突破了传统CAN协议的速率限制,在仲裁阶段可沿用传统CAN的波特率,而在数据传输阶段,波特率可灵活提升至仲裁阶段的数倍,最高可达8Mbps。例如,在工业自动化生产线中,对于需要快速调整运行参数的机器人手臂,CANFD的高传输速率能够确保控制指令的即时下达与执行反馈的迅速获取。
数据长度的扩展 CANFD将数据长度从8字节拓展至64字节,这一改进意义重大。以电动汽车的动力系统控制为例,车辆在行驶过程中,电池管理系统、电机驱动系统与车辆控制系统之间需要频繁交换大量数据,包括电池状态、电机转速、扭矩等参数。CANFD的长数据帧特性使得这些数据可以在单帧内完整传输,减少了数据帧的传输数量,进而降低了总线负载,提高了系统的整体通信效率。
兼容性的保留 CANFD在帧格式上与传统CAN保持高度兼容,这为系统的平滑升级提供了可能。企业无需对现有CAN网络基础设施进行大规模更换,仅需逐步替换或升级节点设备,即可实现向CANFD的过渡。同时,CANFD网络能够兼容传统CAN节点,使得新旧系统可以在过渡期内协同工作,降低了企业的技术更新成本。
三、CANFD技术在实时运动控制系统中的性能测试
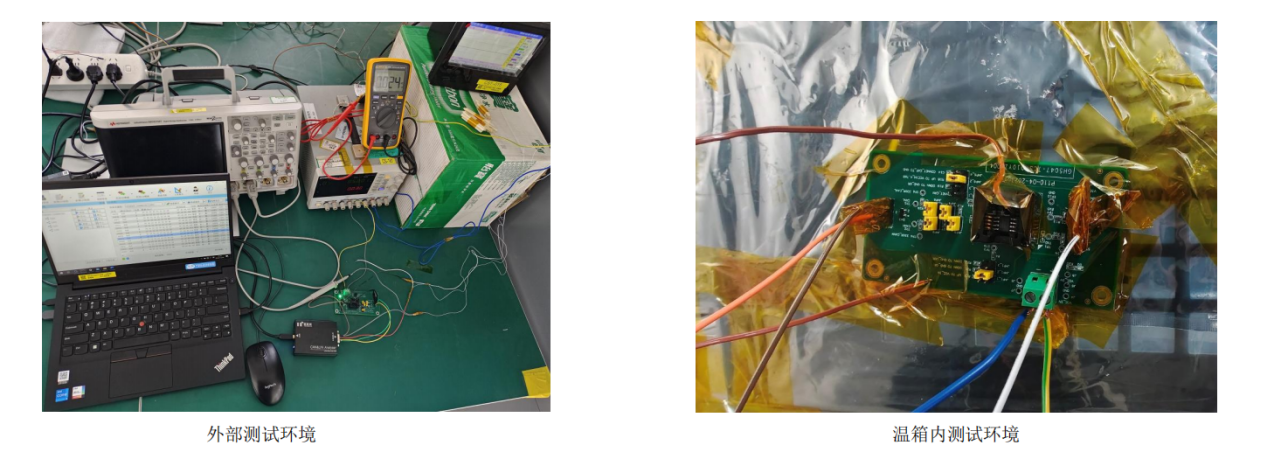
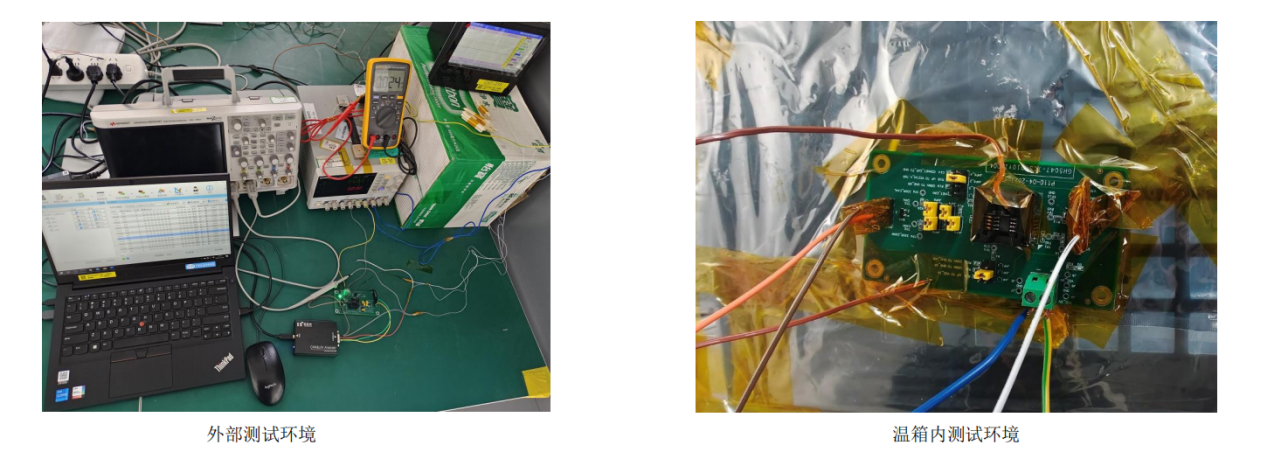
(一)测试环境搭建
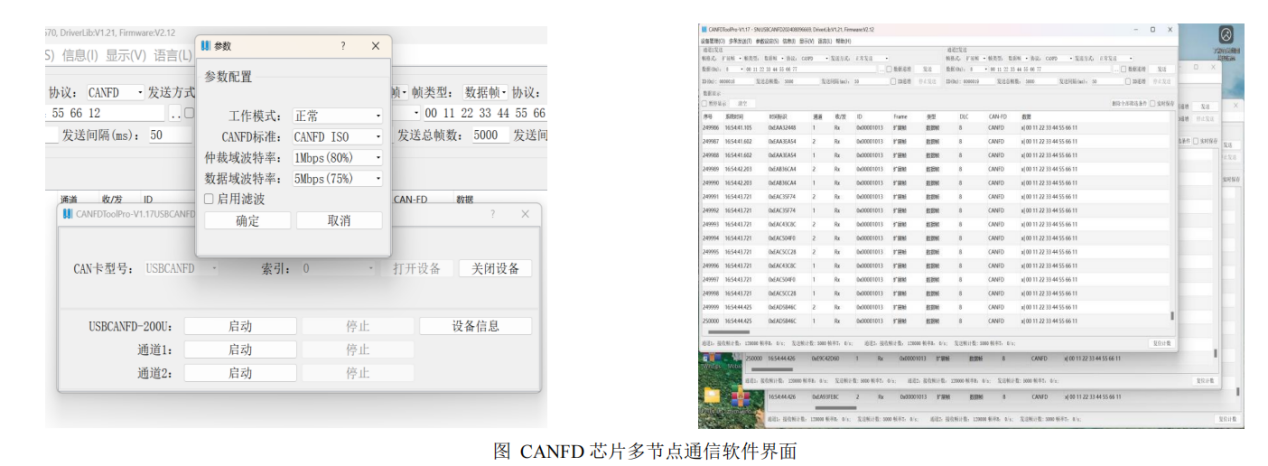
节点配置:将25个节点连接到同一CAN总线上,每个节点均配备ASM1042A型CAN-FD芯片。
通信速率设置:分别设置通信速率为4kps、5Mbps和10Mbps,以测试不同速率下的通信可靠性。
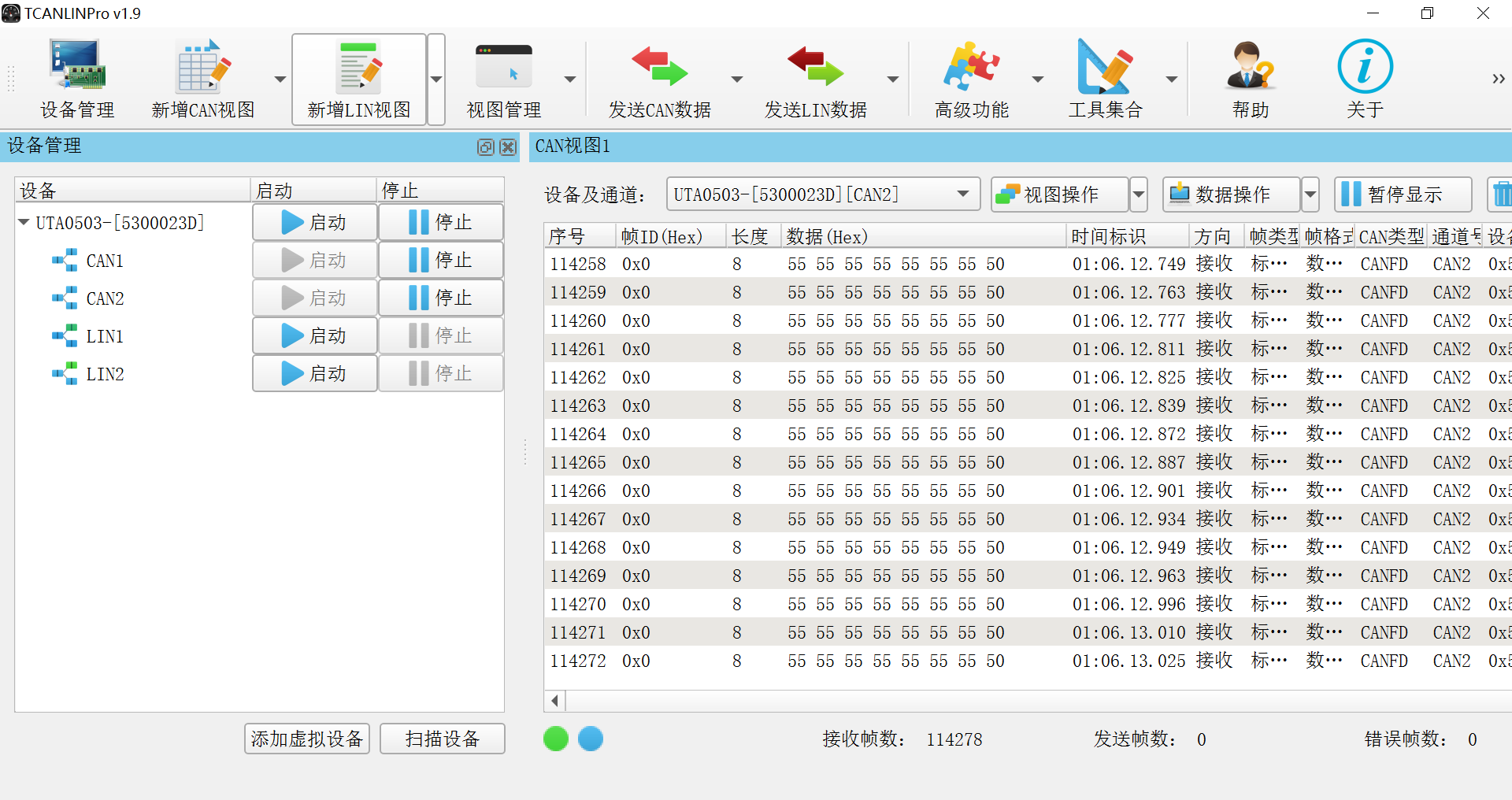
数据传输测试:在每个速率下,发送大量数据帧,并记录接收帧的数量和错误帧的数量。
环境适应性测试:在不同温度条件下(常温、-55℃、125℃)进行数据传输测试,以评估芯片在极端温度下的性能。
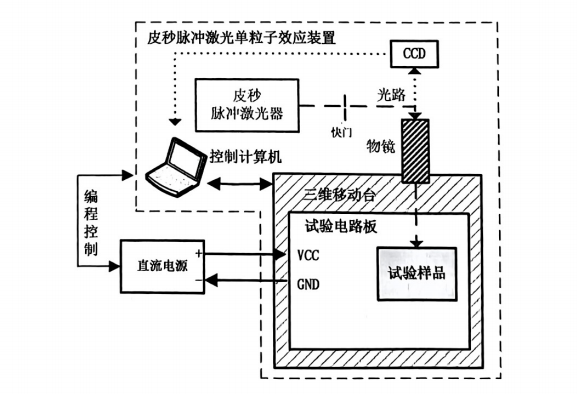
单粒子效应测试:单粒子效应试验采用皮秒脉冲激光单粒子效应试验装置,通过激光正面辐照芯片,模拟高能粒子对芯片的影响。

(二)性能测试指标与方法
多节点通信测试 在评估ASM1042A型CAN-FD芯片在复杂通信环境中的性能。例如,在模拟汽车制造生产线的高速自动化场景中,对数据传输速率进行动态监测,验证其是否能够满足生产线的实时数据交互需求。
数据完整性测试 在运动控制系统中,发送端节点发送包含特定控制指令与数据的CANFD帧,接收端节点接收并解析。通过对比发送与接收数据的一致性来验证数据完整性。以工业机器人为例,在机器人执行复杂动作规划时,对比控制器发送的运动轨迹数据与关节电机接收到的数据,确保数据在传输过程中无丢失或错误。
实时性测试 运用高精度计时器测量CANFD帧从发送端到接收端的传输延迟,以及系统对实时控制信号的响应时间。在实时性要求极高的数控机床加工场景中,微秒级的传输延迟可能直接影响加工精度。通过对CANFD总线的实时性测试,验证其是否能够满足精密加工对控制信号快速响应的要求。
抗干扰能力测试 为了评估ASM1042A型CAN-FD芯片在空间环境中的可靠性,进行了环境适应性测试和单粒子效应脉冲激光试验,模拟工业现场的实际干扰情况。通过监测CANFD总线的误码率、数据丢失率等指标,评估其抗干扰能力。
(三)测试结果分析
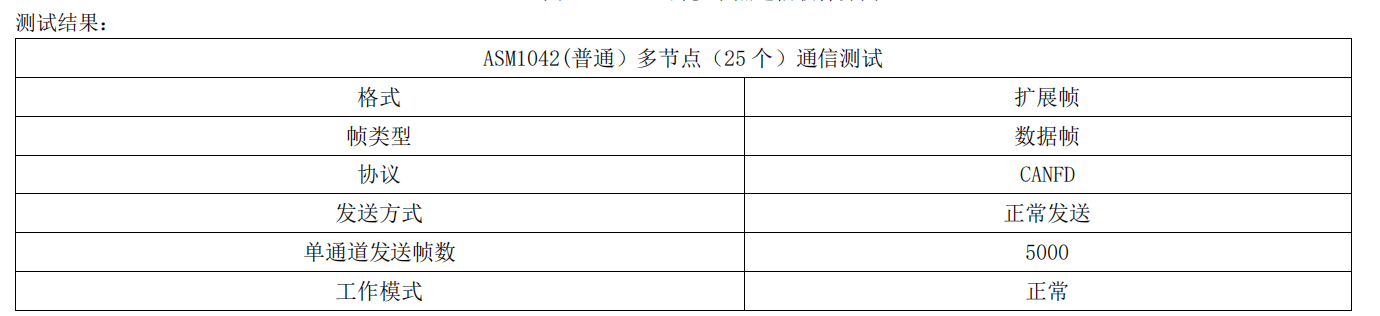
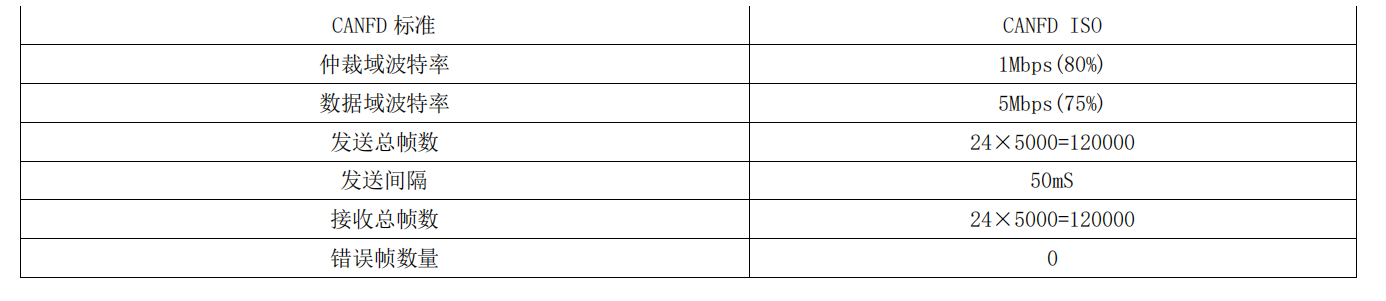
多节点数据传输性能:
测试结果显示,ASM1042A型CAN-FD芯片在多节点(25个)通信测试下的数据传输性能如下:
环境适应性:
在不同温度条件下,ASM1042A型CAN-FD芯片的通信性能如下:

常温:发送功能和接收功能均正常。
125℃:发送功能和接收功能均正常。
-55℃:发送功能和接收功能均正常。
测试结果显示,ASM1042A型CAN-FD芯片在不同激光能量下的单粒子效应如下:
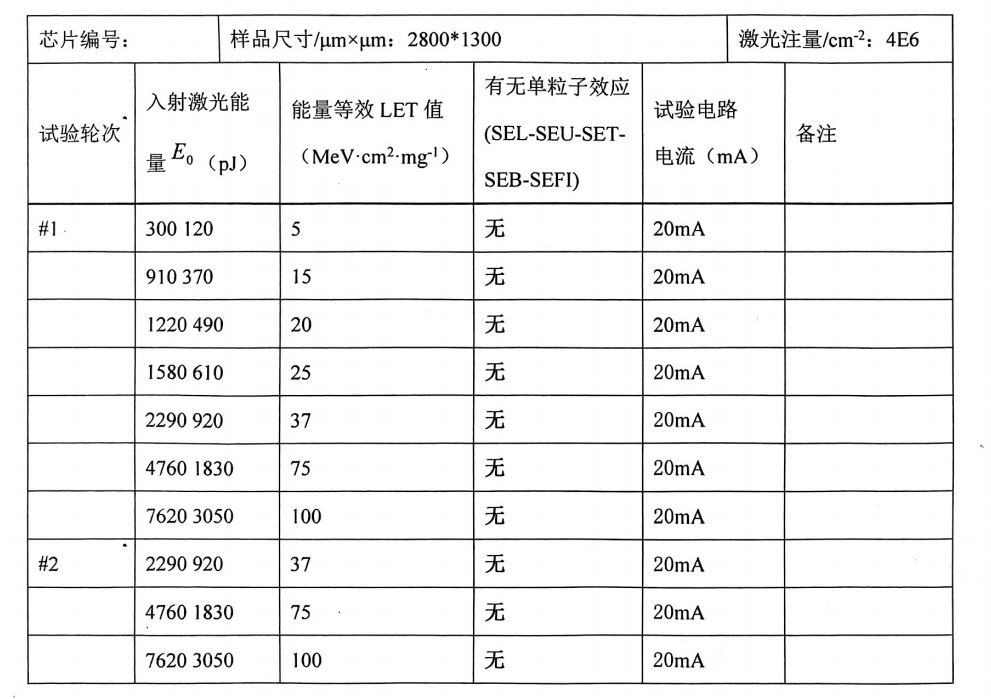
120pJ(LET值为5MeV·cm²/mg):未出现单粒子效应。
370pJ(LET值为15MeV·cm²/mg):未出现单粒子效应。
920pJ(LET值为37MeV·cm²/mg):未出现单粒子效应。
3050pJ(LET值为100MeV·cm²/mg):未出现单粒子效应。
四、CANFD技术的优势与挑战
(一)优势
高效数据传输提升系统性能 在实时运动控制系统中,CANFD高效的数据传输特性能够显著提升系统性能。以自动化包装生产线为例,生产线上的各种设备需要实时协调运行,CANFD能够快速传输包装速度、物料位置等数据,提高生产效率与包装质量。
强大抗干扰能力保障系统稳定 CANFD的抗干扰能力使其在恶劣的工业环境中表现出色。在钢铁厂的自动化生产线上,大量的电磁设备同时运行,CANFD总线能够稳定传输生产过程控制数据,确保钢铁生产的连续性与安全性。
良好兼容性降低升级成本 对于已采用传统CAN协议构建的运动控制系统,CANFD的兼容性使得系统升级变得更加经济可行。例如,在对旧工业机器人的控制系统进行升级改造时,利用CANFD的兼容性,可以逐步替换老旧部件,同时保留部分原有设备,降低了企业的技术升级成本。
(二)挑战
网络规划与配置复杂性 随着数据传输速率的提高,CANFD网络的规划与配置变得更为复杂。网络拓扑结构设计、传输介质选择以及节点参数配置都需要更加精细。不同厂商设备间的兼容性问题也可能导致系统集成困难。例如,在构建大型智能工厂的自动化控制系统时,面对众多不同厂商的设备,需要投入大量时间和资源进行网络规划与设备兼容性测试。
实时性与确定性的更高要求 尽管CANFD提升了实时性,但在一些对时间精度要求极高的超精密运动控制系统中,仍需进一步优化。例如,在航空航天领域的高精度仪器制造中,多轴联动的运动控制系统需要极高的同步精度与确定性,需要对CANFD协议进行深度定制与优化,以满足系统要求。
安全性与可靠性保障难度 实时运动控制系统在关键基础设施中的应用,如智能交通中的自动驾驶系统,对其安全性与可靠性要求极高。CANFD网络需要具备强大的数据加密、身份认证以及故障诊断与冗余机制。然而,目前相关安全技术仍在不断发展完善中,如何构建高安全、高可靠的CANFD网络是亟待解决的问题。
五、CANFD技术在实时运动控制系统中的应用案例
(一)汽车制造生产线
在汽车制造生产线中,实时运动控制系统广泛应用于车身焊接、涂装、装配等环节。CANFD技术的应用使得机器人手臂、自动化输送带、升降机等各种运动控制设备之间的通信更加高效、可靠。通过CANFD总线,控制系统的主控制器可以实时发送运动指令和参数给各个设备节点,同时接收设备的反馈信息,实现精确的运动控制和协调。例如,在车身焊接过程中,多个焊接机器人需要同步工作,以确保焊接质量和效率。CANFD技术的低延迟和高数据传输速率特性能够确保焊接机器人之间的同步精度,提高焊接质量,降低生产成本。
(二)工业机器人
工业机器人是实时运动控制系统的典型应用之一,其对通信系统的实时性、准确性和可靠性有着极高的要求。CANFD技术在工业机器人中的应用,使得机器人的关节电机、末端执行器、传感器等部件之间的通信更加顺畅。机器人控制器可以通过CANFD总线实时获取关节电机的位置、速度、扭矩等状态信息,并根据实时任务需求发送控制指令,实现机器人的精准运动控制和复杂动作规划。此外,CANFD的高抗干扰能力也有助于工业机器人在复杂的工业环境中的稳定运行,提高生产效率和产品质量。
(三)电动汽车
在电动汽车中,实时运动控制系统用于电池管理系统、电机驱动系统、制动系统等关键部件的控制和监测。CANFD技术可以实现这些系统之间的高速、可靠通信,确保车辆的安全运行和性能表现。例如,在电机驱动系统中,CANFD总线可以实时传输电机的控制信号和状态信息,实现对电机的精确控制和故障诊断。同时,在电动汽车的自动驾驶系统中,CANFD技术也为传感器、控制器和执行器之间的通信提供了支持,助力实现更高级别的自动驾驶功能。
六、未来发展趋势
(一)技术融合与创新
随着工业物联网(IIoT)、大数据、人工智能等新兴技术的快速发展,CANFD技术将与这些技术深度融合,实现更智能的运动控制系统。例如,通过将传感器数据通过CANFD总线传输到云端,利用大数据分析和人工智能算法对数据进行处理和分析,可以实现对运动控制系统的实时优化和故障预测。此外,CANFD技术还将与其他现场总线技术、工业以太网技术等进行融合,构建更加灵活、高效的通信网络架构,满足不同应用场景下的多样化需求。
(二)功能增强与性能提升
未来,CANFD协议将继续演进,进一步增强其功能和性能。一方面,将提高数据传输速率的上限,以满足日益增长的数据传输需求。另一方面,将优化协议的实时性和确定性,通过引入更先进的调度算法和数据传输机制,确保运动控制系统的精确同步和实时响应。此外,还将加强CANFD技术的安全性和可靠性,开发更强大的加密、认证和冗余机制,以应对网络安全威胁和系统故障风险。
(三)应用拓展与市场增长
随着智能制造、智能交通、机器人技术等领域的发展,CANFD技术的应用范围将不断扩大。除了传统的汽车制造、工业自动化等领域,将在航空航天、船舶制造、物流运输、智能建筑等新兴领域得到广泛应用。这将推动CANFD芯片、控制器、传感器等相关产品的市场需求持续增长,促进相关产业的快速发展。
七、结论
CANFD技术凭借其高效的数据传输、强大的抗干扰能力、良好的兼容性等优势,在实时运动控制系统中得到了广泛应用。通过对CANFD协议的解析和性能测试,验证了其在实时性、数据完整性、抗干扰性等方面的优势,同时也揭示了在网络规划、实时性优化、安全性保障等方面面临的挑战。随着技术的不断融合与创新、功能的增强与性能的提升以及应用的拓展与市场的增长,CANFD技术将在未来实时运动控制系统中发挥更加重要的作用,为工业自动化、机器人技术、智能交通等领域的发展提供有力支持。