HDRnet——双边滤波和仿射变换的摇身一变
主页:Deep Bilateral Learning
paper:https://groups.csail.mit.edu/graphics/hdrnet/data/hdrnet.pdf
coeffs
这部分的处理对象是低分辨率图,利用CNN进行特征提取(局部和全局),最后fuse得到grid,这里面包含了变换的系数。
splat
原图先通过下采样,得到256x256的固定大小,通过一系列卷积a stack of strided convolutional layers,得到low-level features之后。layer层数越多,下采样得到的图越小,low-level features的好处是最后的grid会更coarser,最后的特征图的感受野也越多,非线性更好,表达力更强。这其实就是CNN相比于手工设计特征的区别,可以准确地只对面部进行提亮:
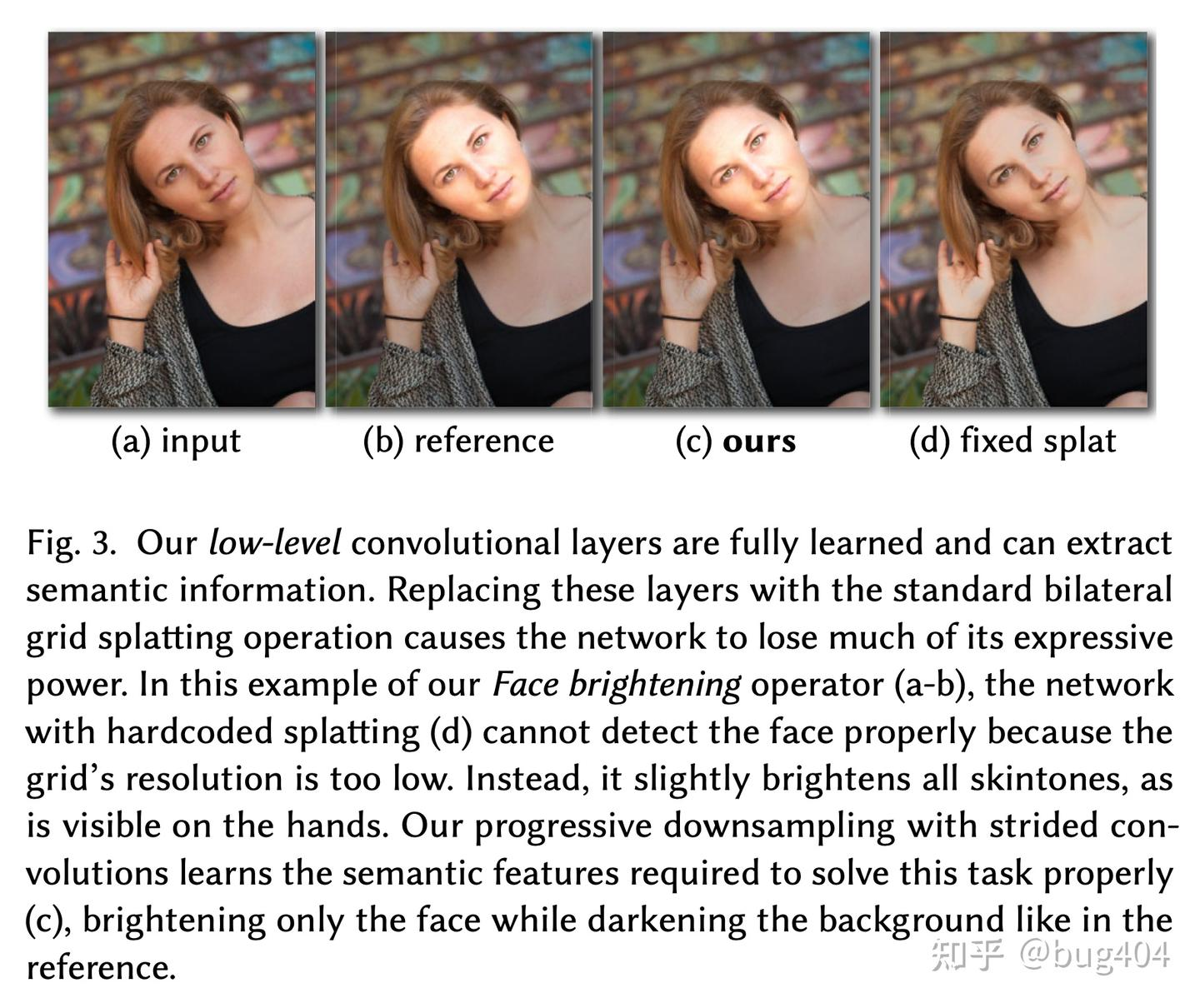
# splat featuresn_layers_splat = int(np.log2(nsize/sb))self.splat_features = nn.ModuleList()prev_ch = 3for i in range(n_layers_splat):use_bn = bn if i > 0 else Falseself.splat_features.append(ConvBlock(prev_ch, cm*(2**i)*lb, 3, stride=2, batch_norm=use_bn))prev_ch = splat_ch = cm*(2**i)*lb处理2D图像需要建立3D bilateral grid,可以把low res分支看作是learned splatting。
Since we produce a 3D bilateral grid from a 2D image in a content-dependent fashion, we can view the low-res stream as implementing a form of learned splatting.
得到low-level features之后,分为两部分:local和global
local
专注于提取local feature,使用fully convolutional,stride=1,特征图保持不变。这部分的和splat部分的
,一共有
层卷积。如果想要在更大的grid上计算coefficients,可以减少
,但为了保持网络的表达能力,减少
的同时要增大
# local featuresself.local_features = nn.ModuleList()self.local_features.append(ConvBlock(splat_ch, 8*cm*lb, 3, batch_norm=bn))self.local_features.append(ConvBlock(8*cm*lb, 8*cm*lb, 3, activation=None, use_bias=False))global
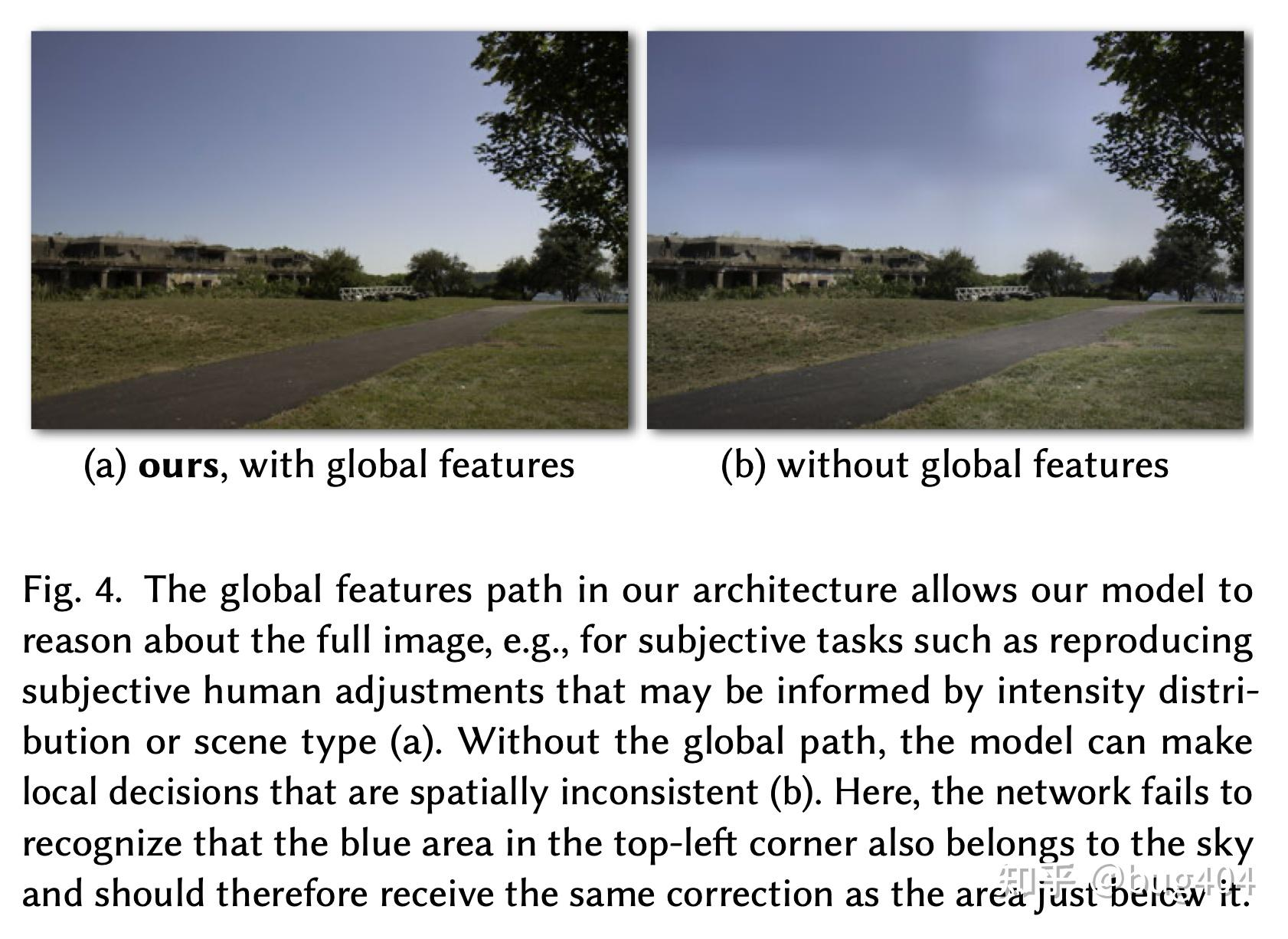
另外一路则同时使用2层stride=2的卷积和3层全连接,得到固定长度的全局信息fixed-size vector of global features,可以提取一些场景信息。使用全连接就意味着low-res input大小只能是固定大小,因为它的大小直接决定了全连接的参数量。但因为r slicing operator的存在,实际还是可以处理各种分辨率数据的。
# global featuresn_layers_global = int(np.log2(sb/4))self.global_features_conv = nn.ModuleList()self.global_features_fc = nn.ModuleList()for i in range(n_layers_global):self.global_features_conv.append(ConvBlock(prev_ch, cm*8*lb, 3, stride=2, batch_norm=bn))prev_ch = cm*8*lbn_total = n_layers_splat + n_layers_globalprev_ch = prev_ch * (nsize/2**n_total)**2self.global_features_fc.append(FC(prev_ch, 32*cm*lb, batch_norm=bn))self.global_features_fc.append(FC(32*cm*lb, 16*cm*lb, batch_norm=bn))self.global_features_fc.append(FC(16*cm*lb, 8*cm*lb, activation=None, batch_norm=bn))全局特征分支得到64维的先验特征,用于指引局部特征,负责会出现一些不连续的artifacts:
The global path produces a 64-dimensional vector that summarizes global information about the input and acts as a prior to regularize the local decisions made by the local path.
fuse
融合使用了pointwise affine mixing,后面接Relu激活层。low_res_input=[H,W], 5层卷积之后的splat_feature [B,128,16,16], local feature尺寸(b,64,16,16)。这里的16就是spatial_bin。全局特征卷积之后的特征图尺寸是4,所以当spatial_bin=16的时候,全局特征使用两层卷积:。
全局特征最后是(b,64),长度和局部特征的通道数是一样的,view成(b,64,1,1),这样local和gobal可以直接相加,相加之后使用1x1卷积,改变通道数,得到的通道数为lb*nout*nin,lb表示luma_bins=8,nin=4.nout=3,所以最后的通道数是96:

通道数为lb*nout*nin的x,使用torch.split以nout*nin为一组进行分组,得到tuple类型的tmp,之后再使用torch.stack对tmp进行合并,得到y,y相比于x,维度上升了一维。
把16x16x96拆分成了16x16x8x12,8就是bilateral grid中cell的个数,12表示的是4x3的仿射矩阵。
fusion_grid = local_featuresfusion_global = global_features.view(bs,8*cm*lb,1,1)fusion = self.relu( fusion_grid + fusion_global )x = self.conv_out(fusion)s = x.shapey = torch.stack(torch.split(x, self.nin*self.nout, 1),2)# y = torch.stack(torch.split(y, self.nin, 1),3)按照bilateral grid的思想应该是原始信号升维之后再进行滤波的,这里使用CNN在通道层面卷积之后再拆分开来,是殊途同归,这样就避免了三维卷积的使用。两种特征fuse得到的特征A(论文中的图2)可以看作是bilateral grid of affine coefficients
This operation is therefore more expressive than simply applying 3D convolutions in the grid, which would only induce local connectivity on z [Jampani et al. 2016]
.In a sense, by maintaining a 2D convolution formulation throughout and only interpreting the last layer as a bilateral grid, we let the network decide when the 2D to 3D transition is optimal.
guide
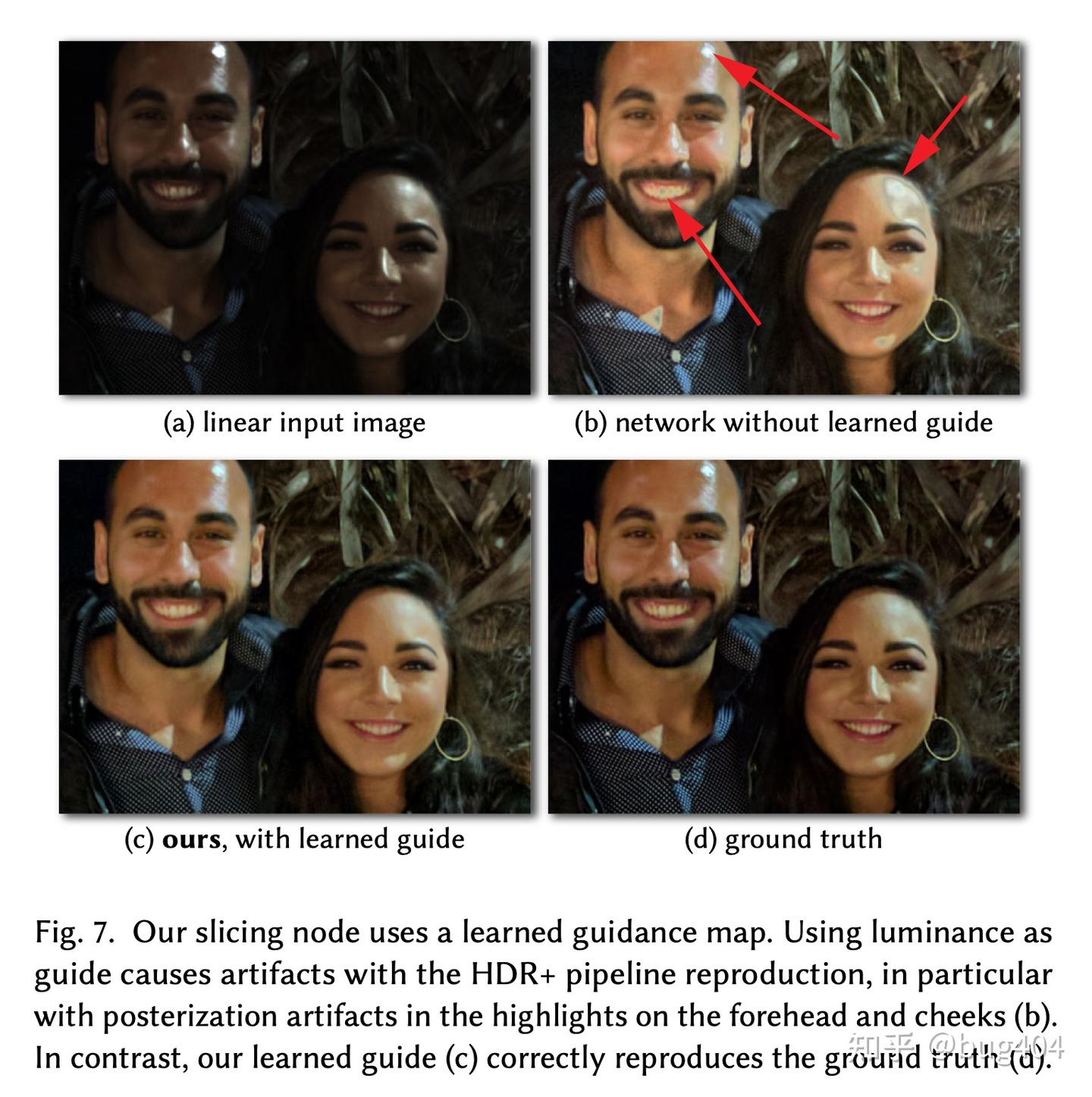
对全尺寸高分辨率图进行处理。stride=1,padding=0,结果两层卷积之后分辨率没用发生变化。得到的guide map是一个单通道的图。
这里的特征提取也是很重要的,下面的结果就表明了learned guide比亮度作为引导图,有更好的效果:
slice
二维图像得到的grid是3D的,分别是x,y,val:
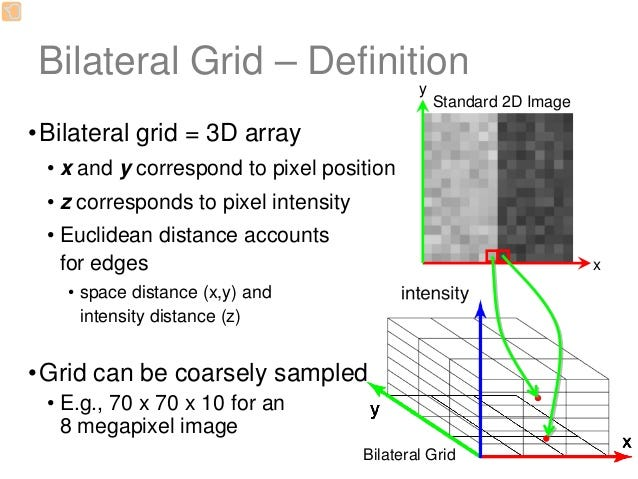
3D grid通过升维把空间信息和像素值信息放在了同一个空间下,是bilateral grid思想的延续。为了进一步减少计算量,grid相比于guide可以是尺寸更小的。上图中就提到,70x70x10的grid可以对应800万像素的图像。
如fuse章节所说,具体实现时使用的仍然是2D卷积,只不过把c通道进行了重新划分。所以最终grid是5维的[B,in*out,n,H,W],permute之后是[B,H,W,n,in*out],B是batchsize,n表示对guide的量化级数,in*out表示每个cell的变换系数。
对batch中的每个样本做处理。slice的输入是guide map g 和feature map A (viewed as a bilateral grid),输出是a new feature map,但是分辨率和guide map g一样,所以slice本质是一个上采样的过程,使用的是 tri-linearly interpolating

x,y经过比例映射到grid的位置,与i,j越近,权重会越大。亮度g则是经放大d倍后与k相比,越相近权重越大。这里的d=8,意味着亮度只分了8个级别。
这个过程没用参数需要学习,所以可以使用OpenGL实现。因为有guide map的使用,相比于反卷积,有更好的边缘恢复。
applay_coeffs
局部看作是仿射变换
recent work has observed that even complicated image processing pipelines can often be accurately modeled as a collection of simple local transformations [Chen et al. 2016; Gharbi et al. 2015; He and Sun 2015].
所以原始rgb经过3x4大小的矩阵映射就得到了输出:
'''Affine:r = a11*r + a12*g + a13*b + a14g = a21*r + a22*g + a23*b + a24...'''R = torch.sum(full_res_input * coeff[:, 0:3, :, :], dim=1, keepdim=True) + coeff[:, 9:10, :, :]G = torch.sum(full_res_input * coeff[:, 3:6, :, :], dim=1, keepdim=True) + coeff[:, 10:11, :, :]B = torch.sum(full_res_input * coeff[:, 6:9, :, :], dim=1, keepdim=True) + coeff[:, 11:12, :, :]return torch.cat([R, G, B], dim=1)reference:
1.https://zhuanlan.zhihu.com/p/587350063
2.https://zhuanlan.zhihu.com/p/37404280
3.https://zhuanlan.zhihu.com/p/614185346
4.https://groups.csail.mit.edu/graphics/hdrnet/data/hdrnet.pdf
5.https://zhuanlan.zhihu.com/p/37404280
6.https://zhuanlan.zhihu.com/p/614185346
7.https://zhuanlan.zhihu.com/p/537612591