【深度学习】PyTorch实现VGG16模型及网络层数学原理
一、Demo概述
代码已附在文末
1.1 代码功能
- ✅ 实现VGG16网络结构
- ✅ 在CIFAR10数据集上训练分类模型
1.2 环境配置
详见【深度学习】Windows系统Anaconda + CUDA + cuDNN + Pytorch环境配置
二、各网络层概念
2.1 卷积层(nn.Conv2d)
nn.Conv2d(in_channels=3, out_channels=64, kernel_size=3, padding=1)
| 参数 | 含义 | 作用说明 |
|---|---|---|
in_channels | 输入通道数(如RGB图为3) | 接收输入的维度 |
out_channels | 输出通道数(卷积核数量) | 提取不同特征类型的数量 |
kernel_size | 卷积核尺寸(如3x3) | 决定感知的局部区域大小 |
padding | 边缘填充像素数 | 保持输出尺寸与输入一致 |
作用:通过滑动窗口提取局部特征(如边缘、颜色分布)
示例: 输入3通道224x224图片 → 通过64个3x3卷积核 → 输出64通道224x224特征图
1)卷积后的输出尺寸:
卷积后的输出尺寸由以下公式决定:
输出尺寸 = 输入尺寸 − 卷积核尺寸 + 2 × 填充 步长 + 1 \text{输出尺寸} = \frac{\text{输入尺寸} - \text{卷积核尺寸} + 2 \times \text{填充}}{\text{步长}} + 1 输出尺寸=步长输入尺寸−卷积核尺寸+2×填充+1
在代码中:
- 输入尺寸:224x224
- 卷积核尺寸:3x3 → (k=3)
- 填充 (padding):1 → (p=1)
- 步长 (stride):1 → (s=1)(默认值)
代入公式:
输出尺寸 = 224 − 3 + 2 × 1 1 + 1 = 224 \text{输出尺寸} = \frac{224 - 3 + 2 \times 1}{1} + 1 = 224 输出尺寸=1224−3+2×1+1=224
因此,宽度和高度保持不变(仍为224x224)。
2)64个卷积核的输出不同
- 参数初始化差异
- 初始权重随机:每个卷积核的权重矩阵在训练前通过随机初始化生成(如正态分布)
- 示例:
- 卷积核1初始权重可能偏向检测水平边缘
- 卷积核2初始权重可能随机偏向检测红色区域
- 反向传播差异:每个卷积核根据其当前权重计算出的梯度不同
数学表达:
Δ W k = − η ∂ L ∂ W k \Delta W_k = -\eta \frac{\partial \mathcal{L}}{\partial W_k} ΔWk=−η∂Wk∂L- W k W_k Wk:第k个卷积核的权重
- η \eta η:学习率
- 不同位置的梯度导致权重更新方向不同
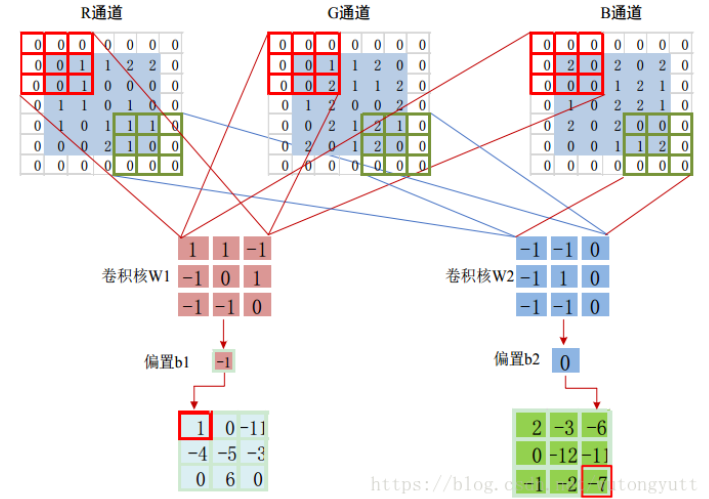
3)卷积核参数的「通道敏感度」
卷积操作的完整计算式为:
输出 = ∑ c = 1 C in ( 输入通道 c ∗ 卷积核权重 c ) + 偏置 \text{输出} = \sum_{c=1}^{C_{\text{in}}} (\text{输入通道}_c \ast \text{卷积核权重}_c) + \text{偏置} 输出=c=1∑Cin(输入通道c∗卷积核权重c)+偏置
其中:
- C in C_{\text{in}} Cin:输入通道数(例如RGB图为3)
- ∗ \ast ∗ 表示卷积运算
- 偏置的意义在于允许激活非零特征
- 不同的卷积核权重决定了通道敏感度,比如RGB三个通道,R通道权重放大即偏好红色特征,红色通道的输入会被加强
4)卷积核参数的「空间敏感度」
- 卷积核矩阵决定空间关注模式,每个卷积核的权重矩阵就像一张「特征检测模板」,决定了在图像中的哪些空间位置组合能激活该核的输出。
[ [ − 1 , 0 , 1 ] , [ − 2 , 0 , 2 ] , [ − 1 , 0 , 1 ] ] [[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]] [[−1,0,1],[−2,0,2],[−1,0,1]] - 这是一个经典的Sobel水平边缘检测核,当输入图像在水平方向有明暗变化时(如水平边缘),左右两侧的权重差异会放大响应值
5)参数协同工作
例. 综合检测红色水平边缘
假设一个卷积核的参数如下:
- 空间权重(与之前Sobel核相同):
[[-1, 0, 1],[-2, 0, 2],[-1, 0, 1]] - 通道权重:
- 红色:0.9, 绿色:0.1, 蓝色:-0.2
- 在红色通道中检测水平边缘 → 高响应
- 在绿色/蓝色通道的同类边缘 → 响应被抑制
- 最终输出:红色物体的水平边缘被突出显示
2.2 激活函数(nn.ReLU)
没有激活函数的神经网络等效于单层线性模型
nn.ReLU(inplace=True)
激活函数有很多种,这里是最简单的一种ReLU

1)ReLU 的数学原理
ReLU(Rectified Linear Unit)的数学定义非常简单:
f ( x ) = max ( 0 , x ) f(x) = \max(0, x) f(x)=max(0,x)
-
正向传播:
- 当输入 x > 0 x > 0 x>0 时,输出 f ( x ) = x f(x) = x f(x)=x(直接传递信号)。
- 当输入 x < = 0 x <= 0 x<=0 时,输出 f ( x ) = 0 f(x) = 0 f(x)=0(完全抑制信号)。
-
反向传播:
- 在 x > 0 x > 0 x>0 时,梯度为 ∂ f ∂ x = 1 \frac{\partial f}{\partial x} = 1 ∂x∂f=1(梯度无衰减)。
- 在 x < = 0 x <= 0 x<=0 时,梯度为 ∂ f ∂ x = 0 \frac{\partial f}{\partial x} = 0 ∂x∂f=0(梯度归零)。
2)引入非线性
如果神经网络只使用线性激活函数(如 ( f(x) = x )),无论堆叠多少层,最终等效于单层线性变换(( W_{\text{total}} = W_1 W_2 \cdots W_n )),无法建模复杂函数。
- ReLU 的非线性:通过分段处理(保留正信号、抑制负信号),打破线性组合,使网络能够学习非线性决策边界。
- 实际意义:ReLU 允许网络在不同区域使用不同的线性函数(正区间为线性,负区间为常数),从而组合出复杂的非线性函数。
3)缓解梯度消失
梯度消失问题通常发生在深层网络中,当反向传播时梯度逐层衰减,导致浅层参数无法更新。
ReLU 的缓解机制如下:
-
导数值恒为 1(正区间): 相比于 Sigmoid(导数最大 0.25)、Tanh(导数最大 1),ReLU 在正区间的梯度恒为 1,避免梯度随网络深度指数级衰减。
-
稀疏激活性: ReLU 会抑制负值信号(输出 0),导致部分神经元“死亡”,但活跃的神经元梯度保持完整,使有效路径的梯度稳定传递。
-
对比其他激活函数: Sigmoid:导数 ( f’(x) = f(x)(1-f(x)) ),当 ( |x| ) 较大时,导数趋近 0。 ReLU:仅需判断 ( x > 0 ),计算高效且梯度稳定。
4)输入与输出
我们输入张量尺寸为 [Channels=64, Height=224, Width=224]:
- 维度不变性:
- ReLU 是逐元素操作(element-wise),不会改变输入输出的形状,输出尺寸仍为 64×224×224。
- 数值变化:
- 正区间:保留原始值,维持特征强度。
- 负区间:置零,可能造成特征稀疏性(部分像素/通道信息丢失)。
- 实际影响:
- 如果输入中存在大量负值(如未规范化的数据),ReLU 会过滤掉这些信息,可能影响模型性能。
- 通常需配合批归一化(BatchNorm) 使用,将输入调整到以 0 为中心,减少负值抑制。
5)局限性与拓展
- 神经元死亡(Dead ReLU):
- 当输入恒为负时,梯度为 0,导致神经元永久失效。
- 解决方案:
- 使用 Leaky ReLU:允许负区间有微小梯度(如 ( f(x) = \max(0.01x, x) ))。
- Parametric ReLU (PReLU):将负区间的斜率作为可学习参数。
2.3 池化层(nn.MaxPool2d)
nn.MaxPool2d(kernel_size=2, stride=2)
1)数学原理
最大池化(Max Pooling)是一种非线性下采样操作,其核心是对输入张量的局部区域取最大值。以参数 kernel_size=2, stride=2 为例:
- 窗口划分:在输入张量的每个通道上,以
2×2的窗口(无重叠)滑动。 - 步长操作:每次滑动
2个像素(横向和纵向均移动 2 步),确保窗口不重叠。 - 计算规则:每个窗口内的最大值作为输出。
示例:
输入矩阵(2×2 窗口,步长 2):
输入 (4×4):
[[1, 2, 3, 4],[5, 6, 7, 8],[9, 10, 11, 12],[13, 14, 15, 16]]输出 (2×2):
[[6, 8],[14, 16]]
- 第一个窗口(左上角)的值为
[1,2;5,6]→ 最大值 6 - 第二个窗口(右上角)的值为
[3,4;7,8]→ 最大值 8 - 依此类推。
2)核心作用
-
降维(下采样):
- 降低特征图的空间分辨率(高度和宽度),减少后续层的计算量和内存消耗。
- 例如,输入尺寸
64×224×224→ 输出64×112×112(通道数不变)。
-
特征不变性增强:
- 平移不变性:即使目标在输入中有轻微平移,最大池化仍能捕捉到其主要特征。
- 旋转/缩放鲁棒性:通过保留局部最显著特征,降低对细节变化的敏感度。
-
防止过拟合:
- 减少参数量的同时,抑制噪声对模型的影响。
-
扩大感受野:
- 通过逐步下采样,后续层的神经元能覆盖输入图像中更大的区域。
3)对输入输出的影响
以 PyTorch 的 nn.MaxPool2d(kernel_size=2, stride=2) 为例:
-
输入尺寸:
[Batch, Channels, Height, Width](如64×3×224×224)。 -
输出尺寸:
输出高度 = ⌊ 输入高度 − kernel_size stride ⌋ + 1 \text{输出高度} = \left\lfloor \frac{\text{输入高度} - \text{kernel\_size}}{\text{stride}} \right\rfloor + 1 输出高度=⌊stride输入高度−kernel_size⌋+1
同理计算宽度。- 若输入为
224×224→ 输出为112×112((224-2)/2 +1 = 112)。
- 若输入为
-
通道数不变:池化操作独立作用于每个通道,不改变通道数。
-
数值变化:
- 每个窗口仅保留最大值,其余数值被丢弃。
- 输出张量的值域与输入一致,但稀疏性可能增加(大量低值被过滤)。
4)与卷积层的区别
| 特性 | 卷积层 (nn.Conv2d) | 最大池化层 (nn.MaxPool2d) |
|---|---|---|
| 可学习参数 | 是(权重和偏置) | 否(固定操作) |
| 作用 | 提取局部特征并组合 | 下采样,保留显著特征 |
| 输出通道数 | 可自定义(通过 out_channels) | 与输入通道数相同 |
| 非线性 | 需配合激活函数(如 ReLU) | 自带非线性(取最大值) |
2.4 全连接层(nn.Linear)
nn.Linear(512*7*7, 4096)
1)数学原理
全连接层(Fully Connected Layer)的数学本质是线性变换 + 偏置,其公式为:
y = W x + b y = Wx + b y=Wx+b
-
输入向量 x ∈ R n x \in \mathbb{R}^{n} x∈Rn:将输入张量展平为一维向量(例如
512×7×7→ 512 × 7 × 7 = 25088 512 \times 7 \times 7 = 25088 512×7×7=25088维)。 -
权重矩阵 W ∈ R m × n W \in \mathbb{R}^{m \times n} W∈Rm×n:维度为
[输出维度, 输入维度],即 4096 × 25088 4096 \times 25088 4096×25088。 -
偏置向量 b ∈ R m b \in \mathbb{R}^{m} b∈Rm:维度为
4096。 -
输出向量 y ∈ R m y \in \mathbb{R}^{m} y∈Rm:维度为
4096。 -
假设输入向量 x ∈ R 25088 x \in \mathbb{R}^{25088} x∈R25088,权重矩阵 W ∈ R 4096 × 25088 W \in \mathbb{R}^{4096 \times 25088} W∈R4096×25088,偏置 b ∈ R 4096 b \in \mathbb{R}^{4096} b∈R4096,则输出向量的第 i i i 个元素为:
y i = ∑ j = 1 25088 W i , j ⋅ x j + b i y_i = \sum_{j=1}^{25088} W_{i,j} \cdot x_j + b_i yi=j=1∑25088Wi,j⋅xj+bi
每个输出元素是输入向量的加权和,权重矩阵的每一行定义了一个“特征选择器”。
2)核心作用
-
全局特征整合:
- 将卷积层提取的局部特征(如边缘、纹理)通过矩阵乘法整合为全局语义信息(如物体类别)。
- 例如:将
512×7×7的特征图(对应图像不同区域的特征)映射到更高维度的抽象语义空间(如“猫”“狗”的分类特征)。
-
非线性建模能力:
- 通常配合激活函数(如 ReLU)使用,增强网络的非线性表达能力。
-
维度压缩/扩展:
- 通过调整输出维度(如
4096),实现特征压缩(降维)或扩展(升维)。
- 通过调整输出维度(如
3)对输入输出的影响
以 nn.Linear(512*7*7, 4096) 为例:
-
输入尺寸:
- 假设输入为
[Batch=64, Channels=512, Height=7, Width=7],需先展平为[64, 512×7×7=25088]。
- 假设输入为
-
输出尺寸:
- 输出为
[Batch=64, 4096],即每个样本被映射到4096维的特征空间。
- 输出为
-
参数数量:
- 权重矩阵参数: 25088 × 4096 = 102 , 760 , 448 25088 \times 4096 = 102,760,448 25088×4096=102,760,448
- 偏置参数: 4096 4096 4096
- 总计:102,764,544 个可训练参数。
4)适用场景与局限性
-
适用场景:
- 传统卷积网络(如 AlexNet、VGG)的分类头部。
- 需要全局特征交互的任务(如语义分割中的上下文建模)。
-
局限性:
- 参数量过大:例如本例中超过 1 亿参数,易导致过拟合和计算成本高。
- 空间信息丢失:展平操作破坏特征图的空间结构,不适合需要保留位置信息的任务(如目标检测)。
-
替代方案:
- 全局平均池化(GAP):将
512×7×7压缩为512×1×1,再输入全连接层,大幅减少参数(例如 ResNet)。 - 1×1 卷积:保留空间维度,实现局部特征交互。
- 全局平均池化(GAP):将
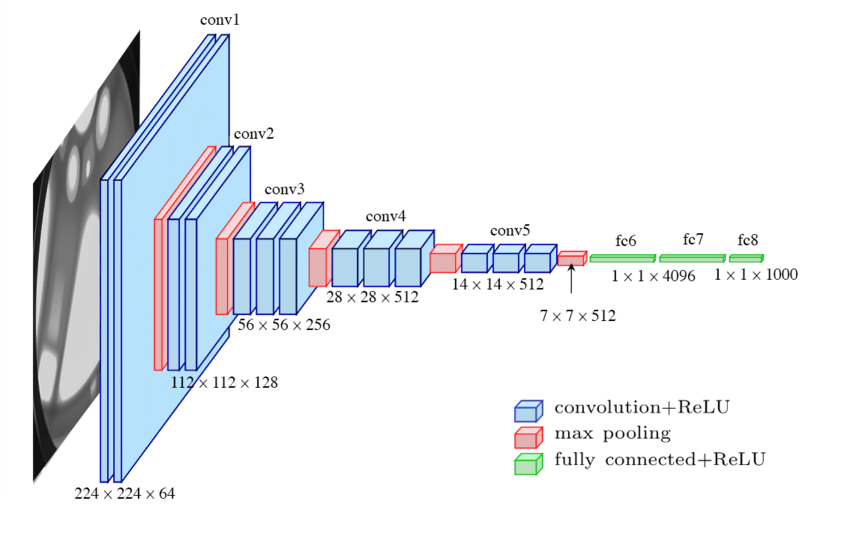
三、VGG16网络结构实现
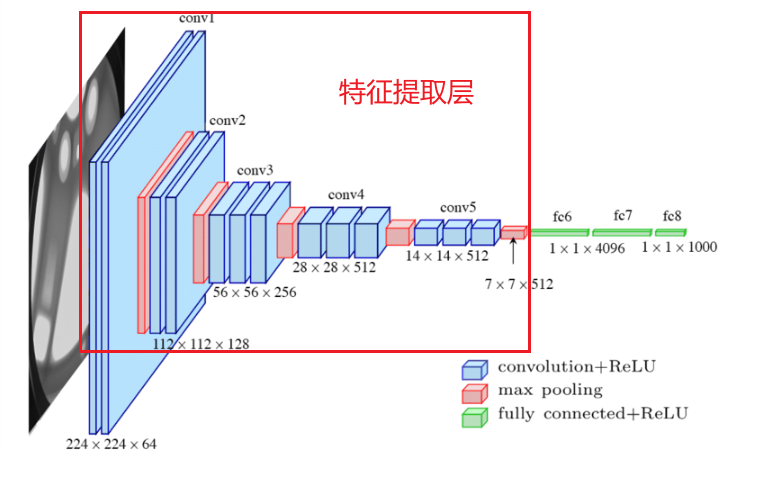
3.1 特征提取层
self.features = nn.Sequential(# Block 1 (2 conv layers)nn.Conv2d(3, 64, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.Conv2d(64, 64, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.MaxPool2d(kernel_size=2, stride=2), # 输出尺寸112x112# 后续Block结构类似,此处省略...
)
3.1.1 特征提取的作用
- 特征提取的本质:通过卷积核的局部计算、ReLU的非线性激活、池化的降维,将原始像素逐步抽象为高层语义特征。
- 数学公式的递进:
像素 → 卷积+ReLU 边缘 → 卷积+ReLU 纹理 → 池化 物体部件 → ... 语义特征 \text{像素} \xrightarrow{\text{卷积+ReLU}} \text{边缘} \xrightarrow{\text{卷积+ReLU}} \text{纹理} \xrightarrow{\text{池化}} \text{物体部件} \xrightarrow{\text{...}} \text{语义特征} 像素卷积+ReLU边缘卷积+ReLU纹理池化物体部件...语义特征 - 对输入的影响:空间分辨率降低,通道数增加,特征语义逐步抽象化。
3.1.2 数学原理
-
卷积层(核心操作):
每个卷积核(如3×3)在输入特征图上滑动,计算局部区域的加权和:
输出 ( x , y ) = ∑ i = − 1 1 ∑ j = − 1 1 输入 ( x + i , y + j ) ⋅ 权重 ( i , j ) + 偏置 \text{输出}(x,y) = \sum_{i=-1}^{1}\sum_{j=-1}^{1} \text{输入}(x+i, y+j) \cdot \text{权重}(i,j) + \text{偏置} 输出(x,y)=i=−1∑1j=−1∑1输入(x+i,y+j)⋅权重(i,j)+偏置- 权重共享:同一卷积核在不同位置使用相同权重,捕捉空间不变性特征。
- 多通道:每个卷积核输出一个通道,多个卷积核组合可提取多维度特征。
-
ReLU 激活函数:
ReLU ( x ) = max ( 0 , x ) \text{ReLU}(x) = \max(0, x) ReLU(x)=max(0,x)- 作用:引入非线性,增强模型对复杂特征的表达能力。
-
最大池化层:
输出 ( x , y ) = max i , j ∈ 窗口 输入 ( x + i , y + j ) \text{输出}(x,y) = \max_{i,j \in \text{窗口}} \text{输入}(x+i, y+j) 输出(x,y)=i,j∈窗口max输入(x+i,y+j)- 作用:降维并保留最显著特征,提升模型对位置变化的鲁棒性。
以输入图像 [Batch, 3, 224, 224] 为例,逐层分析变化:
| 层类型 | 输入尺寸 | 输出尺寸 | 数学影响 |
|---|---|---|---|
| Conv2d(3→64) | [B,3,224,224] | [B,64,224,224] | 提取 64 种基础特征(边缘/颜色) |
| ReLU | [B,64,224,224] | [B,64,224,224] | 非线性激活,抑制负响应 |
| Conv2d(64→64) | [B,64,224,224] | [B,64,224,224] | 细化特征,增强局部模式组合 |
| MaxPool2d | [B,64,224,224] | [B,64,112,112] | 下采样,保留最显著特征 |
| 重复块(128→256→512) | … | … | 逐层增加通道数,提取更复杂特征 |
| 最终输出 | [B,512,7,7] | [B,512,7,7] | 高层语义特征,输入分类器或检测头 |
- 通道数变化:
3 → 64 → 128 → 256 → 512,表示特征复杂度递增。 - 空间分辨率下降:
224x224 → 7x7,通过池化逐步聚焦全局语义。
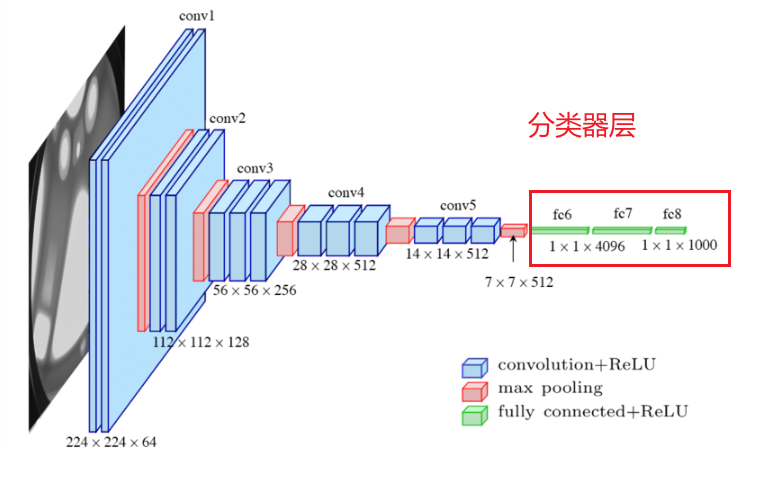
3.2 分类器层
self.classifier = nn.Sequential(nn.Dropout(p=0.5), # 防止过拟合nn.Linear(512*7*7, 4096), # 特征图维度计算nn.ReLU(inplace=True),nn.Dropout(p=0.5),nn.Linear(4096, 4096),nn.ReLU(inplace=True),nn.Linear(4096, num_classes)
)
3.2.1 分类器层作用
分类器层(Classifier)是网络的最后阶段,负责将卷积层提取的高级语义特征映射到类别概率空间。其核心功能包括:
- 特征整合:将全局特征转化为与任务相关的判别性表示。
- 分类决策:通过全连接层(Linear)和激活函数(ReLU)生成类别得分。
- 正则化:通过Dropout减少过拟合,提升模型泛化能力。
3.2.2 数学原理
假设输入特征为 x ∈ R 512 × 7 × 7 x \in \mathbb{R}^{512 \times 7 \times 7} x∈R512×7×7(展平后为25088维),分类器层的计算流程如下:
-
Dropout层(训练阶段):
x drop = Dropout ( x , p = 0.5 ) x_{\text{drop}} = \text{Dropout}(x, p=0.5) xdrop=Dropout(x,p=0.5)- 随机将50%的神经元输出置零,防止过拟合。
-
全连接层1(降维):
y 1 = W 1 x drop + b 1 ( W 1 ∈ R 4096 × 25088 , b 1 ∈ R 4096 ) y_1 = W_1 x_{\text{drop}} + b_1 \quad (W_1 \in \mathbb{R}^{4096 \times 25088}, \, b_1 \in \mathbb{R}^{4096}) y1=W1xdrop+b1(W1∈R4096×25088,b1∈R4096)- 将25088维特征压缩到4096维。
-
ReLU激活:
a 1 = max ( 0 , y 1 ) a_1 = \max(0, y_1) a1=max(0,y1) -
重复Dropout和全连接层:
y 2 = W 2 ( Dropout ( a 1 ) ) + b 2 ( W 2 ∈ R 4096 × 4096 ) y_2 = W_2 (\text{Dropout}(a_1)) + b_2 \quad (W_2 \in \mathbb{R}^{4096 \times 4096}) y2=W2(Dropout(a1))+b2(W2∈R4096×4096)
a 2 = max ( 0 , y 2 ) a_2 = \max(0, y_2) a2=max(0,y2) -
最终分类层:
y logits = W 3 a 2 + b 3 ( W 3 ∈ R 10 × 4096 ) y_{\text{logits}} = W_3 a_2 + b_3 \quad (W_3 \in \mathbb{R}^{10 \times 4096}) ylogits=W3a2+b3(W3∈R10×4096)- 输出10维向量(CIFAR-10的类别数)。
3.2.3 与特征提取层的对比
| 特性 | 特征提取层(卷积层) | 分类器层(全连接层) |
|---|---|---|
| 输入类型 | 原始像素或低级特征 | 高级语义特征(如512×7×7) |
| 操作类型 | 局部卷积、池化 | 全局线性变换、非线性激活 |
| 参数分布 | 权重共享(卷积核) | 全连接权重(无共享) |
| 主要功能 | 提取空间局部特征(边缘→纹理→语义部件) | 整合全局特征,输出类别概率 |
| 维度变化 | 通道数增加,空间分辨率降低 | 特征维度压缩,最终输出类别数 |
三,完整代码
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms, models
from torch.utils.data import DataLoader
import time# 数据预处理
# 将CIFAR-10的32x32图像缩放至224x224(VGG16的标准输入尺寸)。
# 使用ImageNet的均值和标准差进行归一化。
# 缺少数据增强(如随机裁剪、翻转等)。
transform = transforms.Compose([transforms.Resize(224), # VGG16 需要 224x224 的输入transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])# 加载 CIFAR-10 数据集
train_dataset = datasets.CIFAR10(root='./data', train=True, download=True, transform=transform)
test_dataset = datasets.CIFAR10(root='./data', train=False, download=True, transform=transform)train_loader = DataLoader(train_dataset, batch_size=64, shuffle=True, num_workers=4)
test_loader = DataLoader(test_dataset, batch_size=64, shuffle=False, num_workers=4)# 定义 VGG16 模型
# 自定义VGG16模型,包含13个卷积层和3个全连接层。
# 输入尺寸为224x224,经过5次最大池化后特征图尺寸为7x7,全连接层输入维度为512 * 7 * 7=25088,符合原版VGG16设计。
# 特征提取层:13个卷积层(含ReLU激活)+ 5个最大池化层
# 分类层:3个全连接层(含Dropout)
# 输出维度:num_classes(CIFAR-10为10)
class VGG16(nn.Module):def __init__(self, num_classes=10):super(VGG16, self).__init__()# VGG16 的卷积层部分self.features = nn.Sequential(nn.Conv2d(3, 64, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.Conv2d(64, 64, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.MaxPool2d(kernel_size=2, stride=2),nn.Conv2d(64, 128, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.Conv2d(128, 128, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.MaxPool2d(kernel_size=2, stride=2),nn.Conv2d(128, 256, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.Conv2d(256, 256, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.Conv2d(256, 256, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.MaxPool2d(kernel_size=2, stride=2),nn.Conv2d(256, 512, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.Conv2d(512, 512, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.Conv2d(512, 512, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.MaxPool2d(kernel_size=2, stride=2),nn.Conv2d(512, 512, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.Conv2d(512, 512, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.Conv2d(512, 512, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.MaxPool2d(kernel_size=2, stride=2))# VGG16 的全连接层部分self.classifier = nn.Sequential(nn.Dropout(),nn.Linear(512 * 7 * 7, 4096),nn.ReLU(inplace=True),nn.Dropout(),nn.Linear(4096, 4096),nn.ReLU(inplace=True),nn.Linear(4096, num_classes))def forward(self, x):x = self.features(x) # 通过卷积层x = torch.flatten(x, 1) # 展平x = self.classifier(x) # 通过全连接层return x# 实例化模型
model = VGG16(num_classes=10)# 使用 GPU 如果可用
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model.to(device)# 损失函数和优化器
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)# 训练函数
def train(model, train_loader, criterion, optimizer, num_epochs=10):model.train() # 切换到训练模式epoch_times = []for epoch in range(num_epochs):start_time = time.time()running_loss = 0.0correct = 0total = 0for i, (inputs, labels) in enumerate(train_loader):inputs, labels = inputs.to(device), labels.to(device)optimizer.zero_grad() # 清空梯度outputs = model(inputs)loss = criterion(outputs, labels)loss.backward() # 反向传播optimizer.step() # 参数更新running_loss += loss.item()_, predicted = outputs.max(1)total += labels.size(0)correct += predicted.eq(labels).sum().item()epoch_loss = running_loss / len(train_loader)epoch_acc = 100. * correct / totalepoch_end_time = time.time()epoch_duration = epoch_end_time - start_timeepoch_times.append(epoch_duration)print(f'Epoch [{epoch + 1}/{num_epochs}], Loss: {epoch_loss:.4f}, Accuracy: {epoch_acc:.2f}%, Time: {epoch_duration:.2f}s')avg_epoch_time = sum(epoch_times) / num_epochsprint(f'\nAverage Epoch Time: {avg_epoch_time:.2f}s')# 测试函数
def test(model, test_loader):model.eval() # 切换到评估模式correct = 0total = 0with torch.no_grad():for inputs, labels in test_loader:inputs, labels = inputs.to(device), labels.to(device)outputs = model(inputs)_, predicted = outputs.max(1)total += labels.size(0)correct += predicted.eq(labels).sum().item()accuracy = 100. * correct / totalprint(f'Test Accuracy: {accuracy:.2f}%')# 训练和测试模型
train(model, train_loader, criterion, optimizer, num_epochs=10)
test(model, test_loader)