WebGL数学手记:矩阵基础
一、矩阵的定义
矩阵,数学术语。在数学中,矩阵(Matrix)是一个按照长方阵列排列的复数或实数集合。
1.英文发音(Matrix)
Matrix的发音类似于中文的[美吹克斯],知道它的发音。方便后期看教程时能听懂别人讲什么。
2.定义
由 m × n 个数aij排成的m行n列的数表称为m行n列的矩阵,简称m × n矩阵。记作:
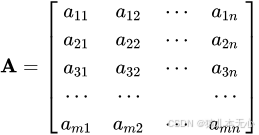
这m×n 个数称为矩阵A的元素,简称为元,数aij位于矩阵A的第i行第j列,称为矩阵A的(i,j)元,以数 aij为(i,j)元的矩阵可记为(aij)或(aij)m × n,m×n矩阵A也记作Amn。
3.单位矩阵

二、矩阵运算
1.矩阵乘法
1.1前提条件
矩阵A的列数 = 矩阵B的行数
如果A是m×n矩阵,B必须是n×p矩阵,结果矩阵C将是m×p矩阵
1.2计算公式
对于矩阵C = A × B,其中A是m×n矩阵,B是n×p矩阵:
矩阵C的第i行第j列元素cij计算公式为:
cij = ai1*b1j + ai2*b2j + ... + ain*bnj = Σ(aik * bkj) (k=1到n)

2.转置矩阵
将矩阵的行列互换得到的新矩阵称为转置矩阵,转置矩阵的行列式不变。
的行列互换之后得到的矩阵,称为的转置矩阵,记作
例如, ,
,
3.逆矩阵
对于一个n×n的方阵A,如果存在另一个n×n矩阵B,使得A × B = B × A = I
其中I是单位矩阵,那么:
-
矩阵A称为可逆矩阵(或非奇异矩阵)
-
矩阵B称为A的逆矩阵,记作A⁻¹
3.1存在意义
类似于倒数的概念,在几何运算中常用于撤回的操作,比如有一个矩阵 这个矩阵的线性变换是将坐标系逆时针旋转90(下面有讲到旋转矩阵),这时候有一个向量(1,1)乘这个矩阵,相当于逆时针旋转90度得到(-1,1)
*
=
在普通的实数运算中 一个变量x 乘 2 再乘 最终的结果是不变的,在向量的运算中也是这样
的逆矩阵是
*
=
三、几何意义
❗直白来说就是有一个矩阵A,让向量发生线性转换
1.平移矩阵
假设有一个平面点(x,y),要做一个平移(x+tx,y+ty),把坐标(x,y)当成一个2x1的矩阵去找刚刚好的一个矩阵,因为2x2的矩阵不满足这样一个矩阵,就在3x3的矩阵中刚好找到这样的一个矩阵
[x'] [ 1 0 tx ] [x] [x + tx]
[y'] = [ 0 1 ty ] [y] = [y + ty]
[1 ] [ 0 0 1 ] [1] [ 1 ]所以下面这个矩阵通常就叫做平移矩阵
[ 1 0 tx ]
[ 0 1 ty ]
[ 0 0 1 ]同样的道理,如果在三维坐标中平移矩阵就是
[ 1 0 0 tx ]
[ 0 1 0 ty ]
[ 0 0 1 tz ]
[ 0 0 0 1 ]❓为什么需要矩阵多加一行和一列?
-
不加的话矩阵只能表示线性变换(旋转、缩放、剪切等)
-
平移是仿射变换,不是线性变换
-
通过增加一维(w分量),可以将平移表示为线性变换
2.缩放矩阵
[x'] [ sx 0] [x] [x · sx]
[y'] = [ 0 sy] [y] = [y · sy]//二维
[ sx 0 ]
[ 0 sy]
//三维
[ sx 0 0 ]
[ 0 sy 0 ]
[ 0 0 sz]3.旋转矩阵
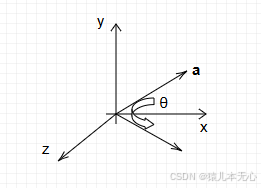
3.1绕X轴旋转(θ角度)
[x'] [ 1 0 0 ] [x] [x]
[y'] = [ 0 cosθ -sinθ ] [y] = [cosθy -sinθz]
[z'] = [ 0 sinθ cosθ ] [z] = [sinθy + cosθz][ 1 0 0 ]
[ 0 cosθ -sinθ]
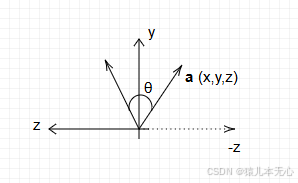
[ 0 sinθ cosθ]如果上面的不好理解的话就假设θ再小一点儿
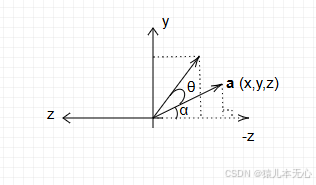
旋转后y值坐标为向量的模乘sin(α+θ)
由三角函数sin(α+β) = sinαcosβ+ cosαsinβ、 sin(α-β) = sinαcosβ - cosαsinβ可得
y' = ycosθ + xsinθ 【💡y= sinα; x = cosα】
因为上图是逆时针旋转的,也就是说 θ是负数,所以真实的情况是
y' = ycosθ - xsinθ
以此类推可得出下面绕y轴旋转和绕z轴旋转的旋转矩阵
3.2绕Y轴旋转(θ角度)
[ cosθ 0 sinθ]
[ 0 1 0 ]
[ -sinθ 0 cosθ]3.3绕Z轴旋转(θ角度)
[ cosθ -sinθ 0]
[ sinθ cosθ 0]
[ 0 0 1]//二维的旋转矩阵
[ cosθ -sinθ]
[ sinθ cosθ]