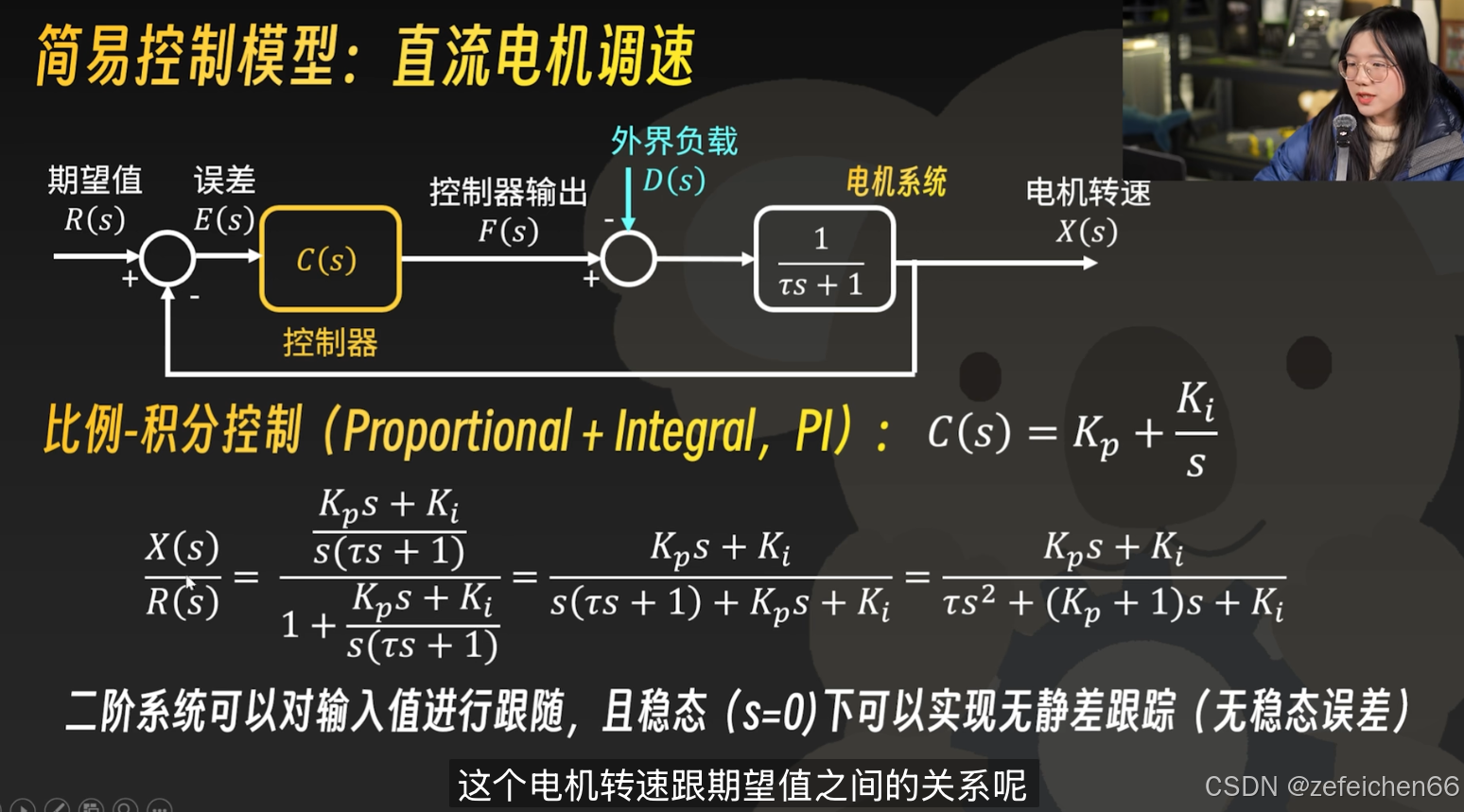
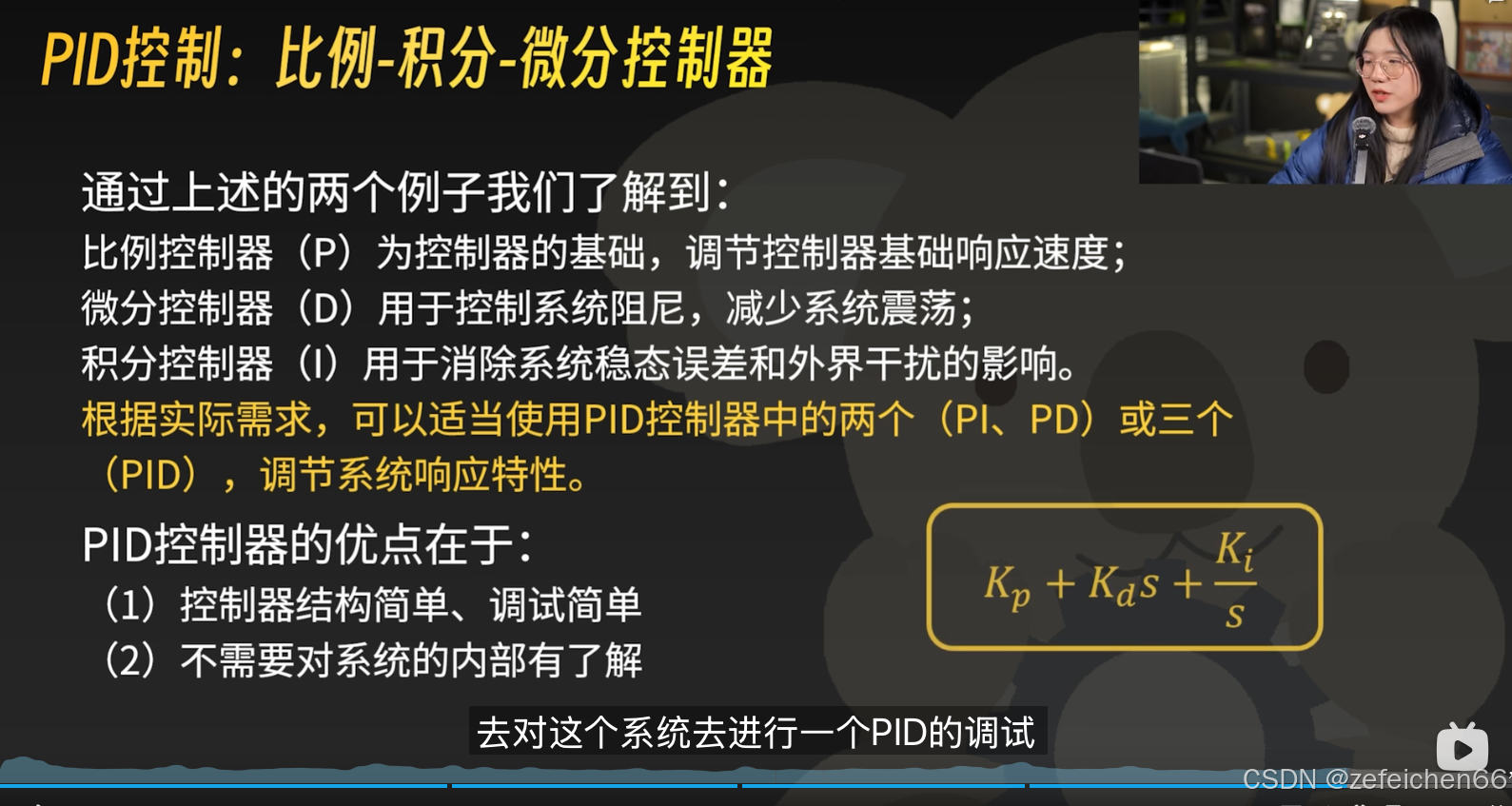
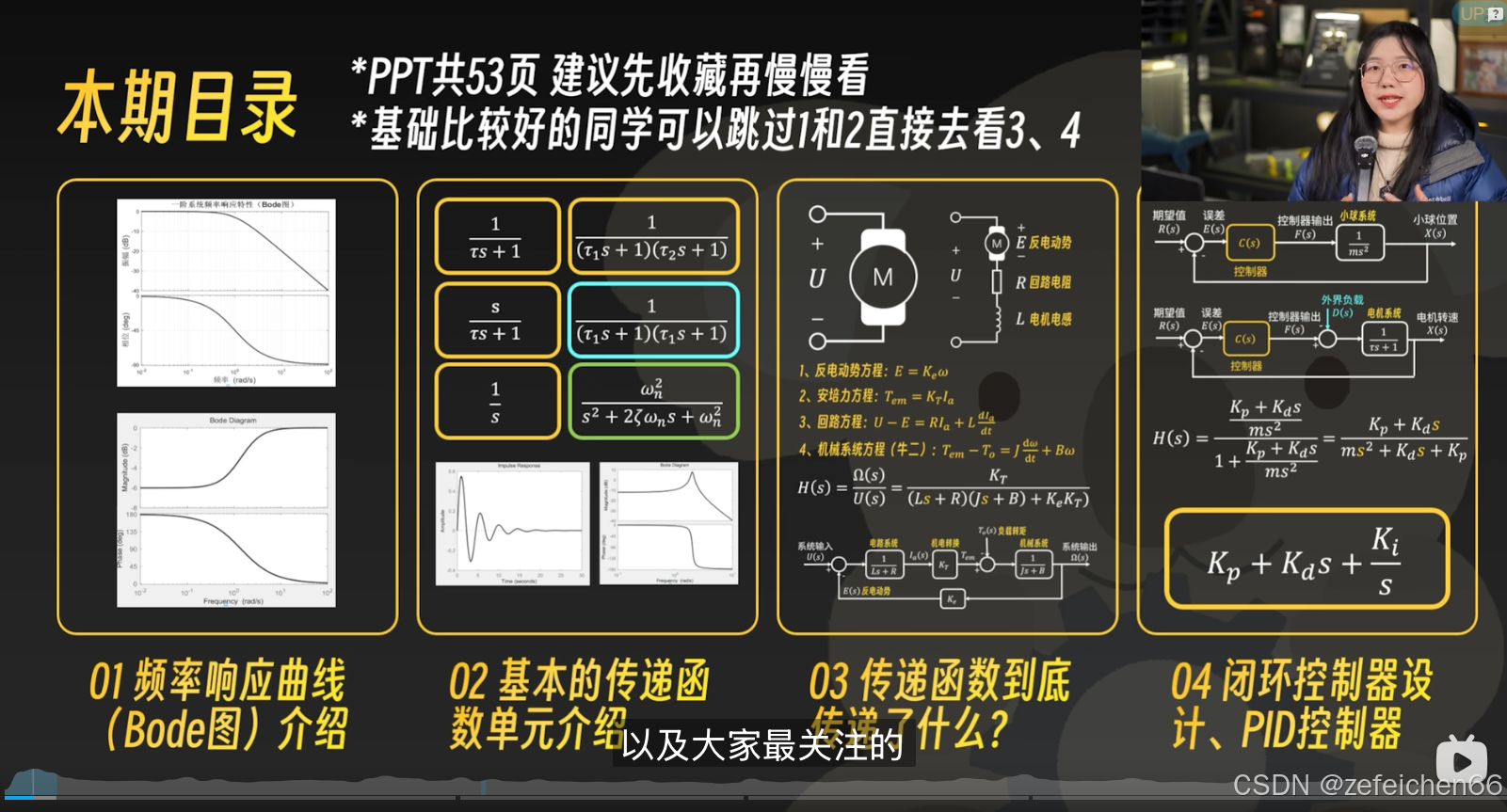
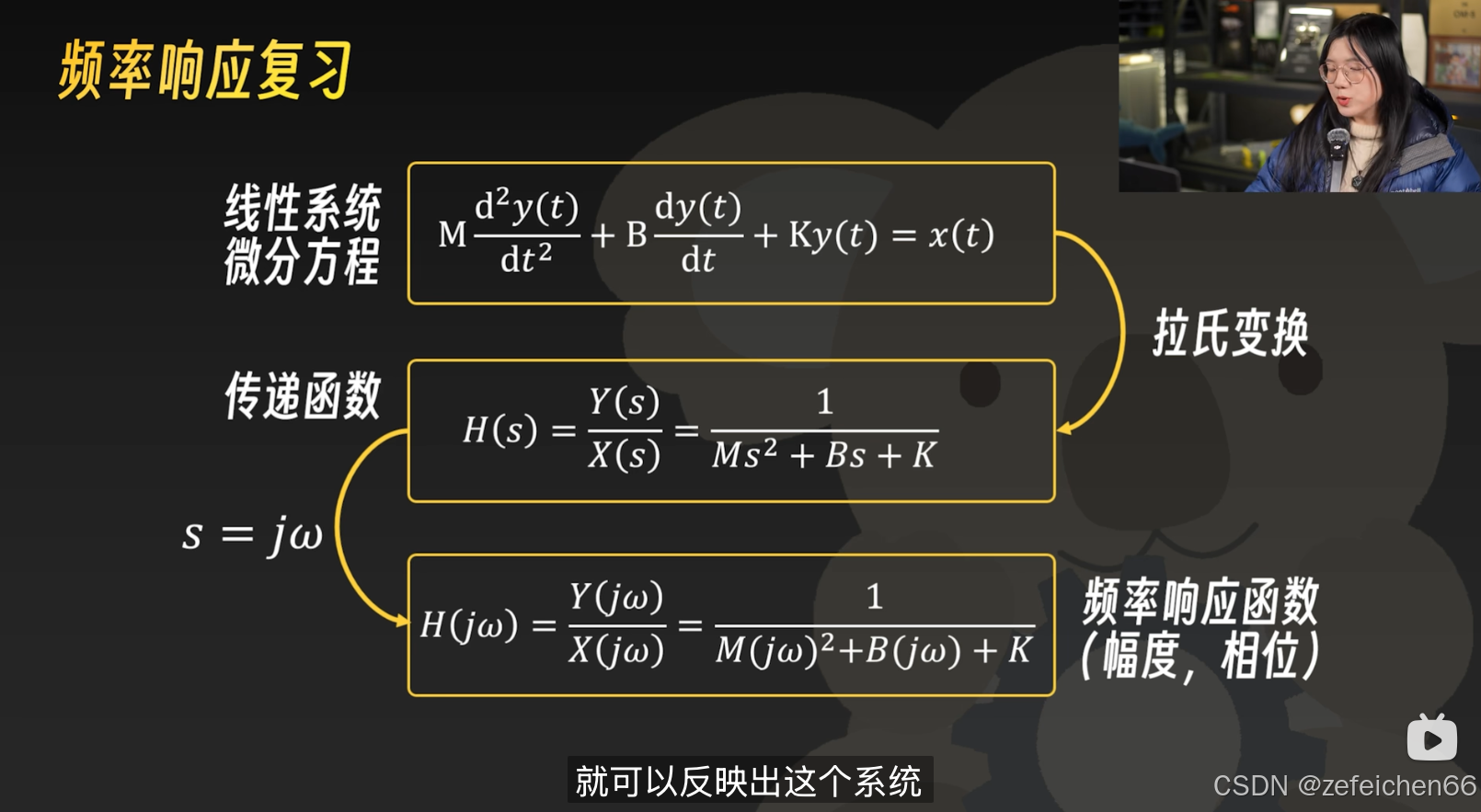
从传递函数到PID控制器
在过程控制中,按偏差的比例(P,Proportional)、积分(I,Integral)和微分(D,Differential)进行控制的PID控制器(亦称PID调节器)是应用最为广泛的一种自动控制器。
硬核-
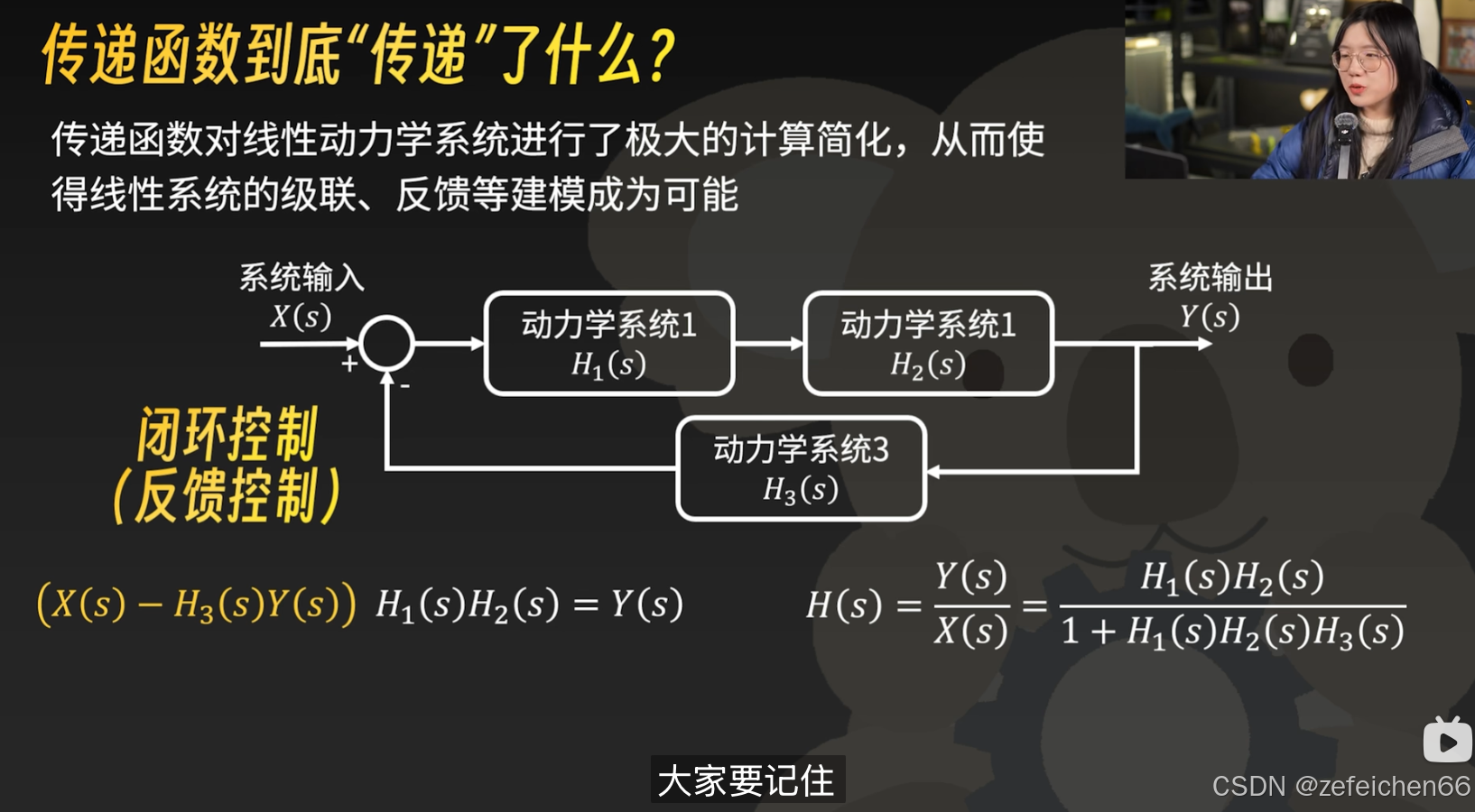
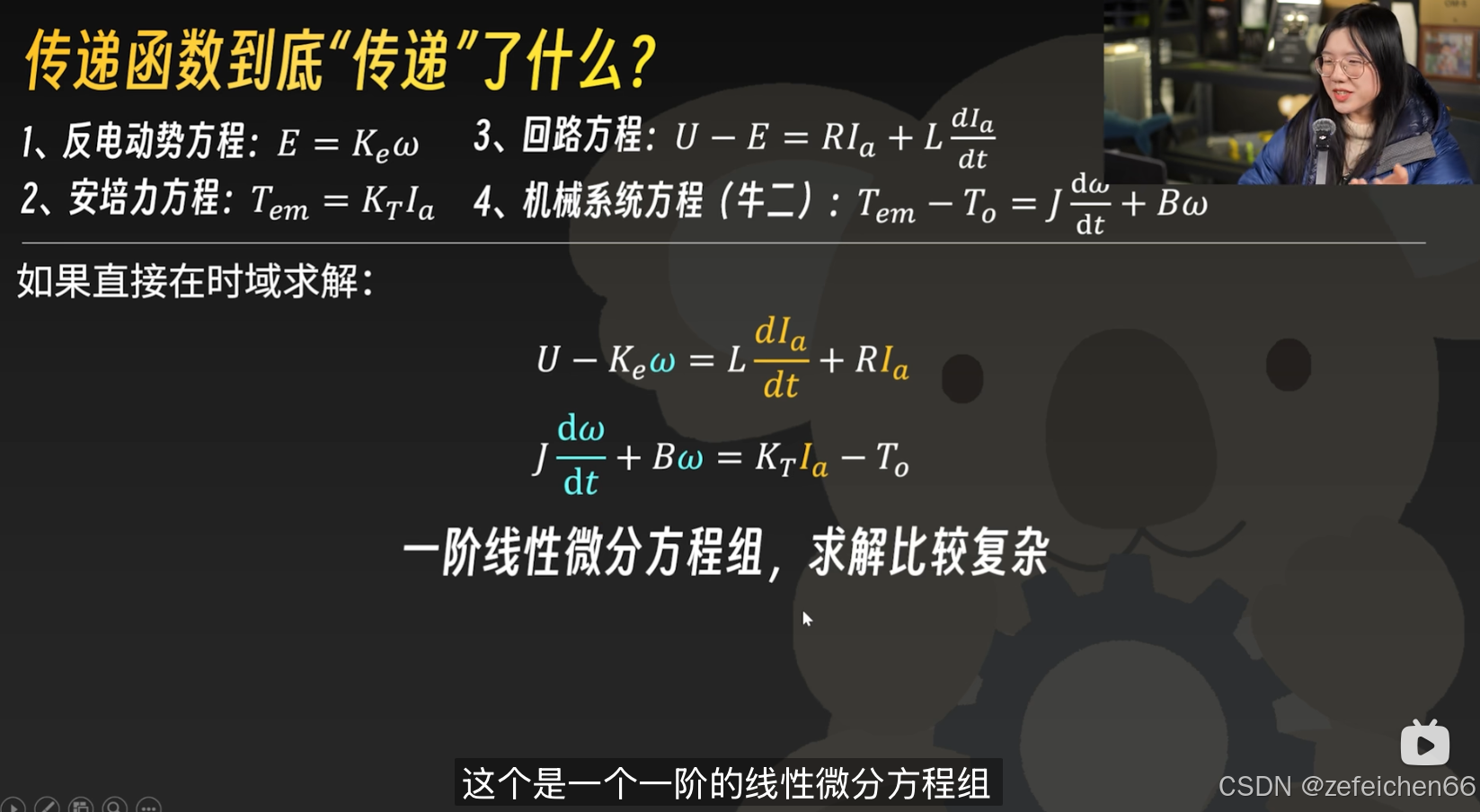
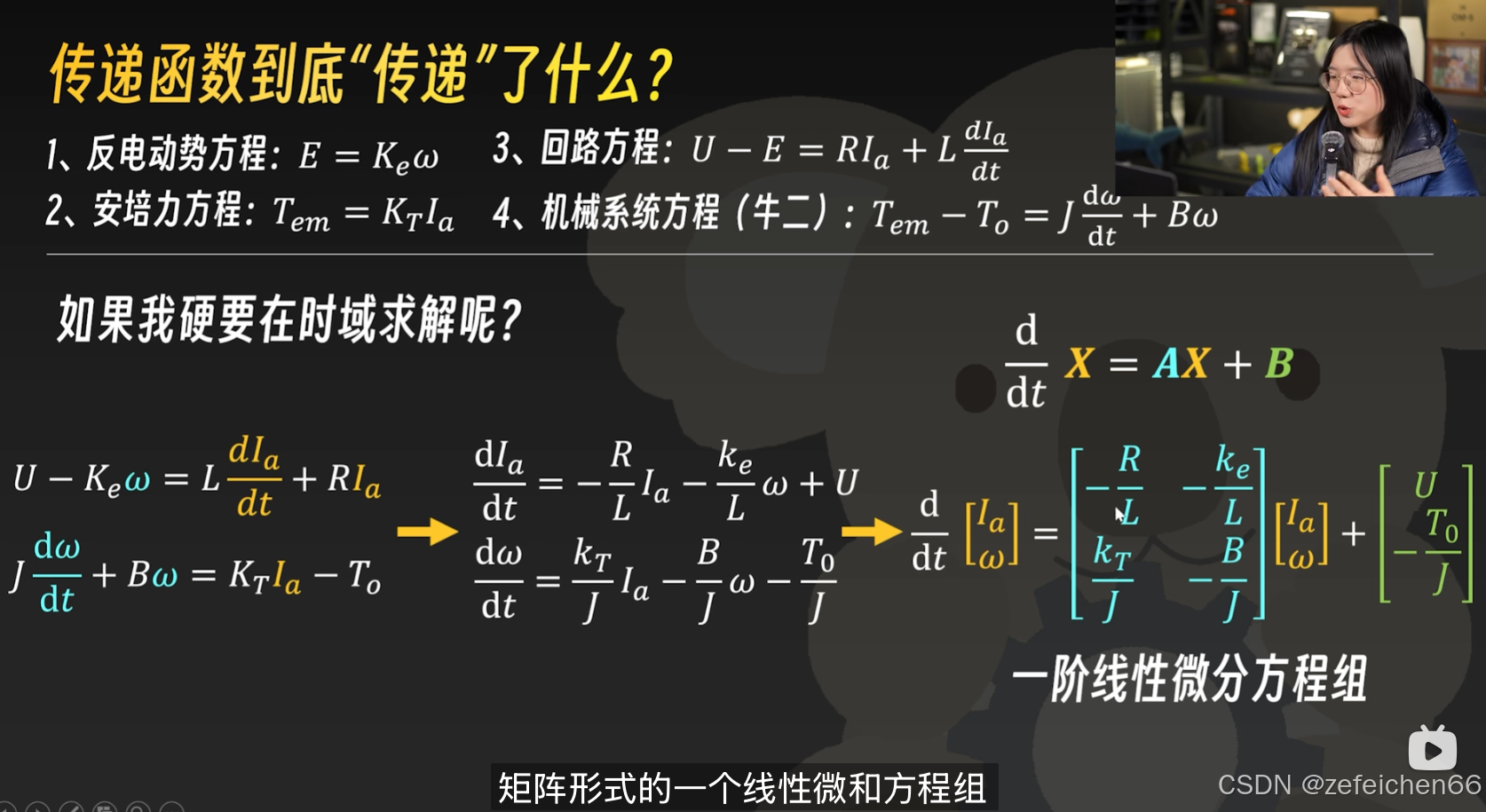
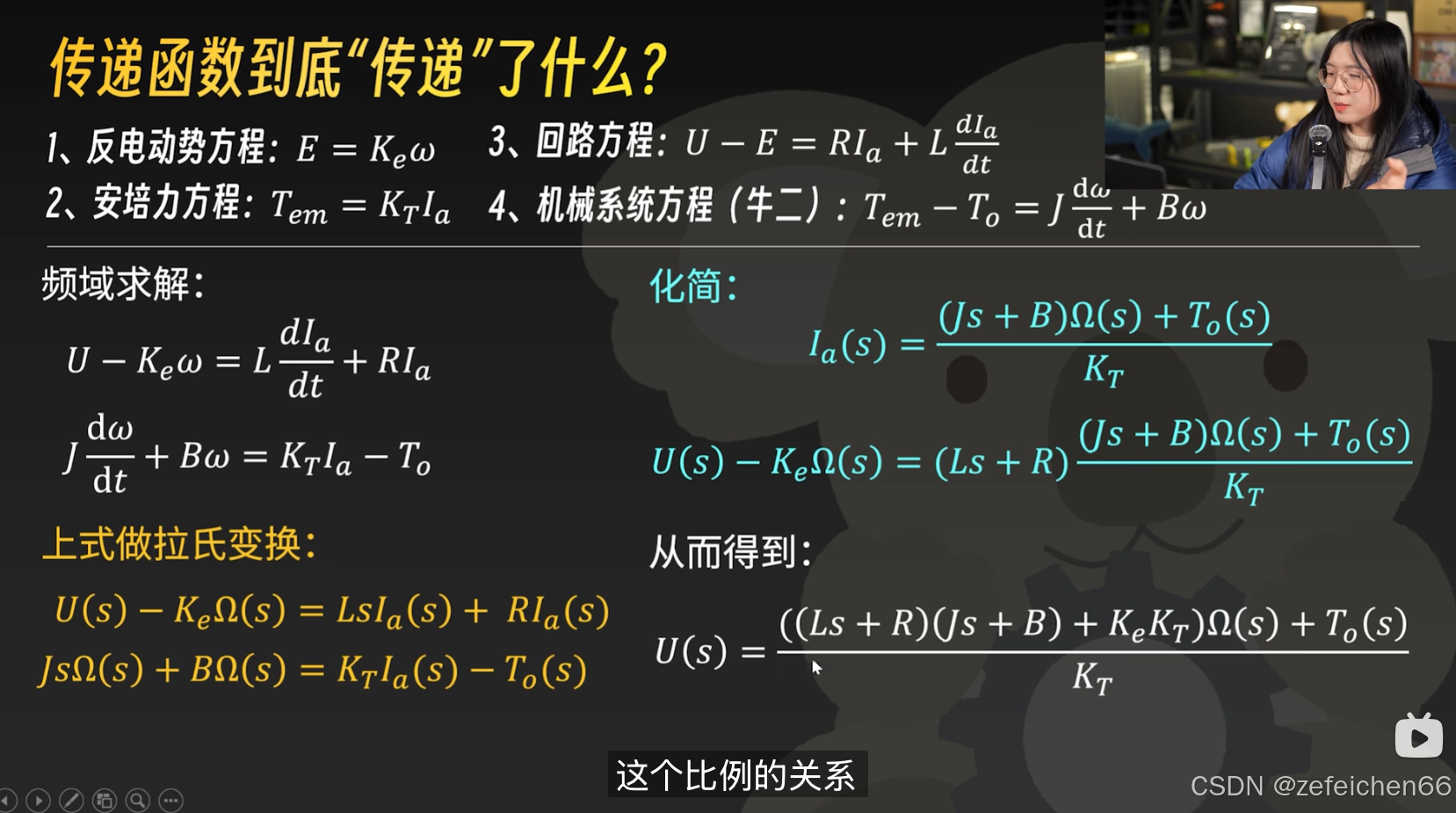
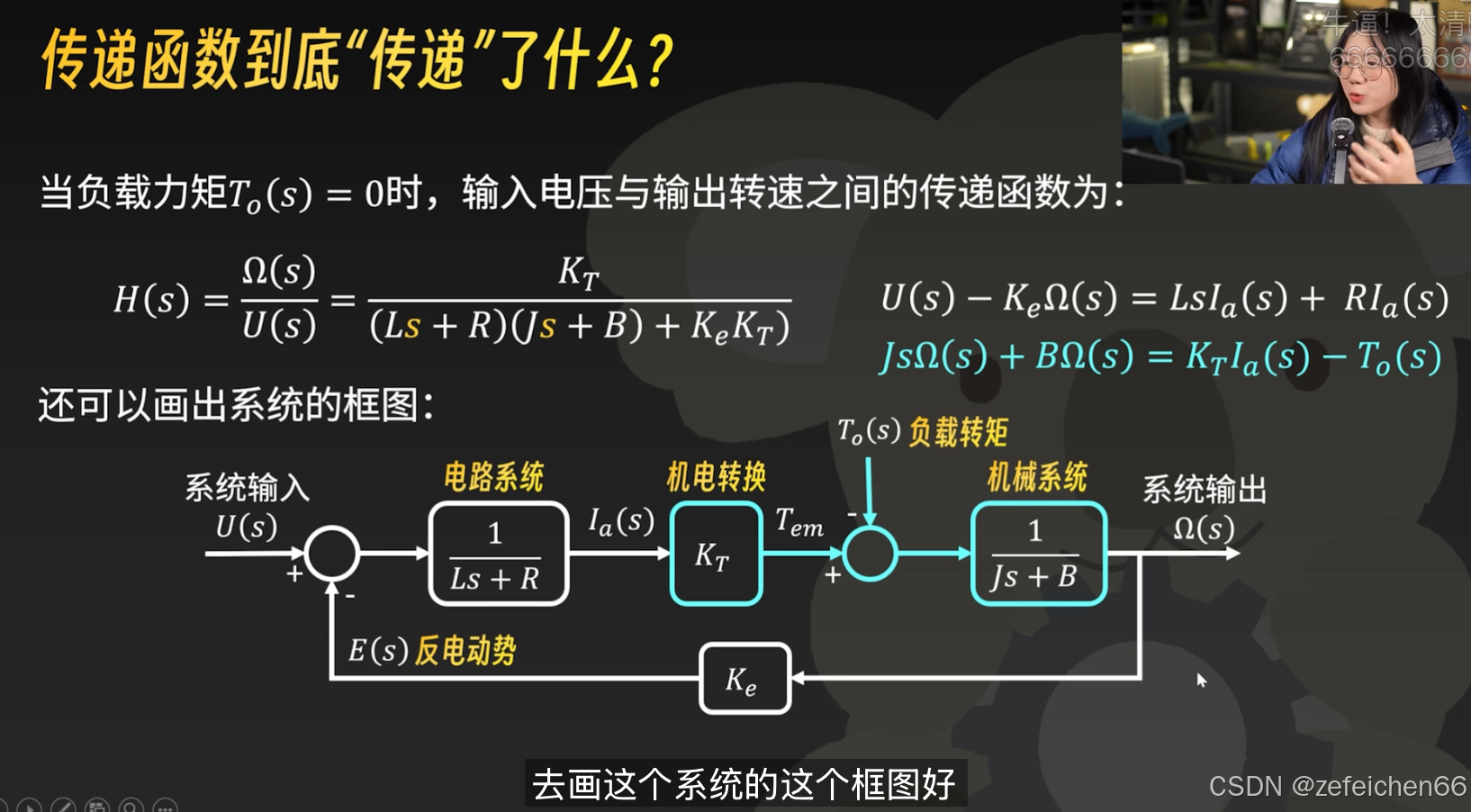
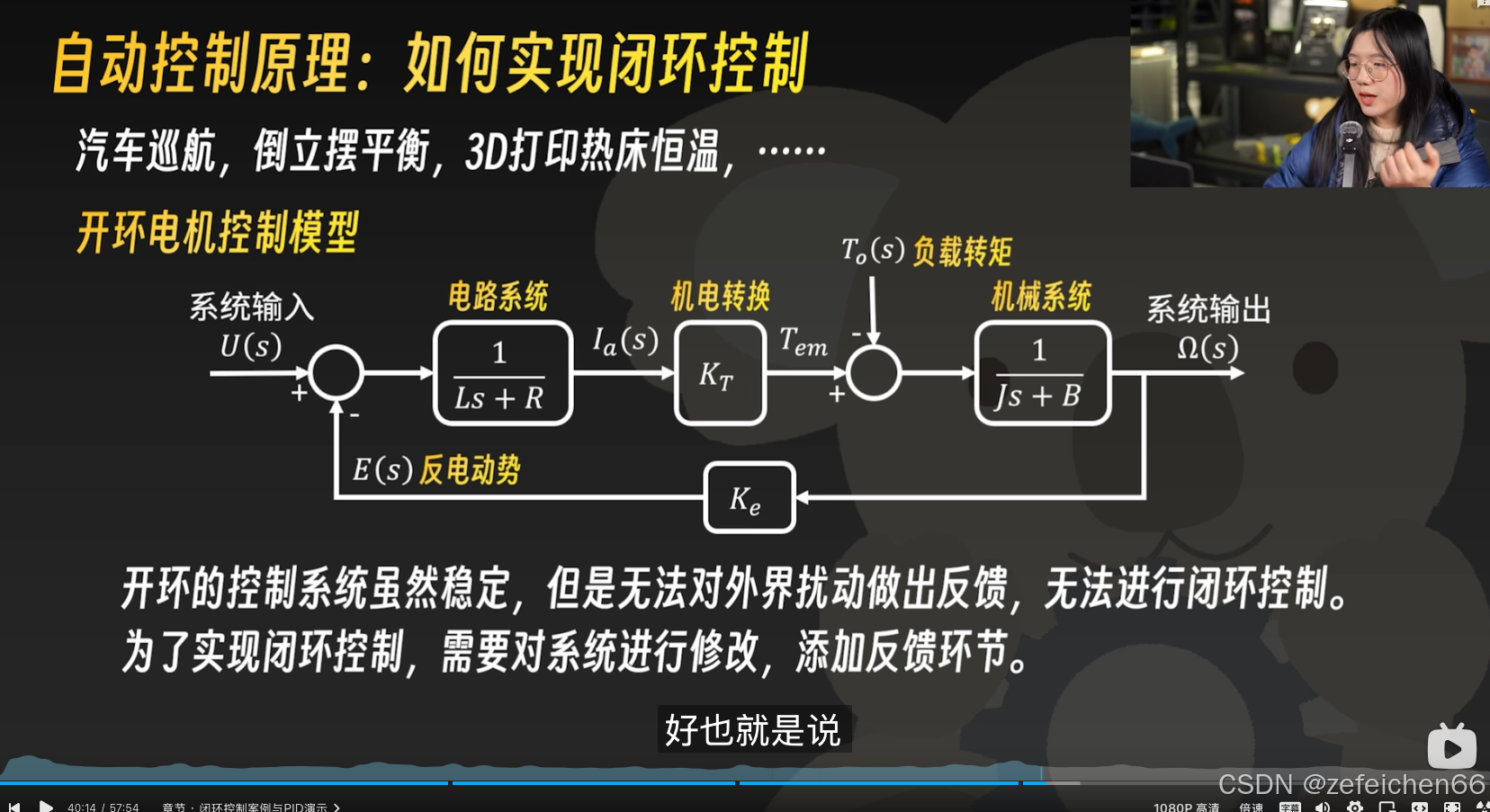
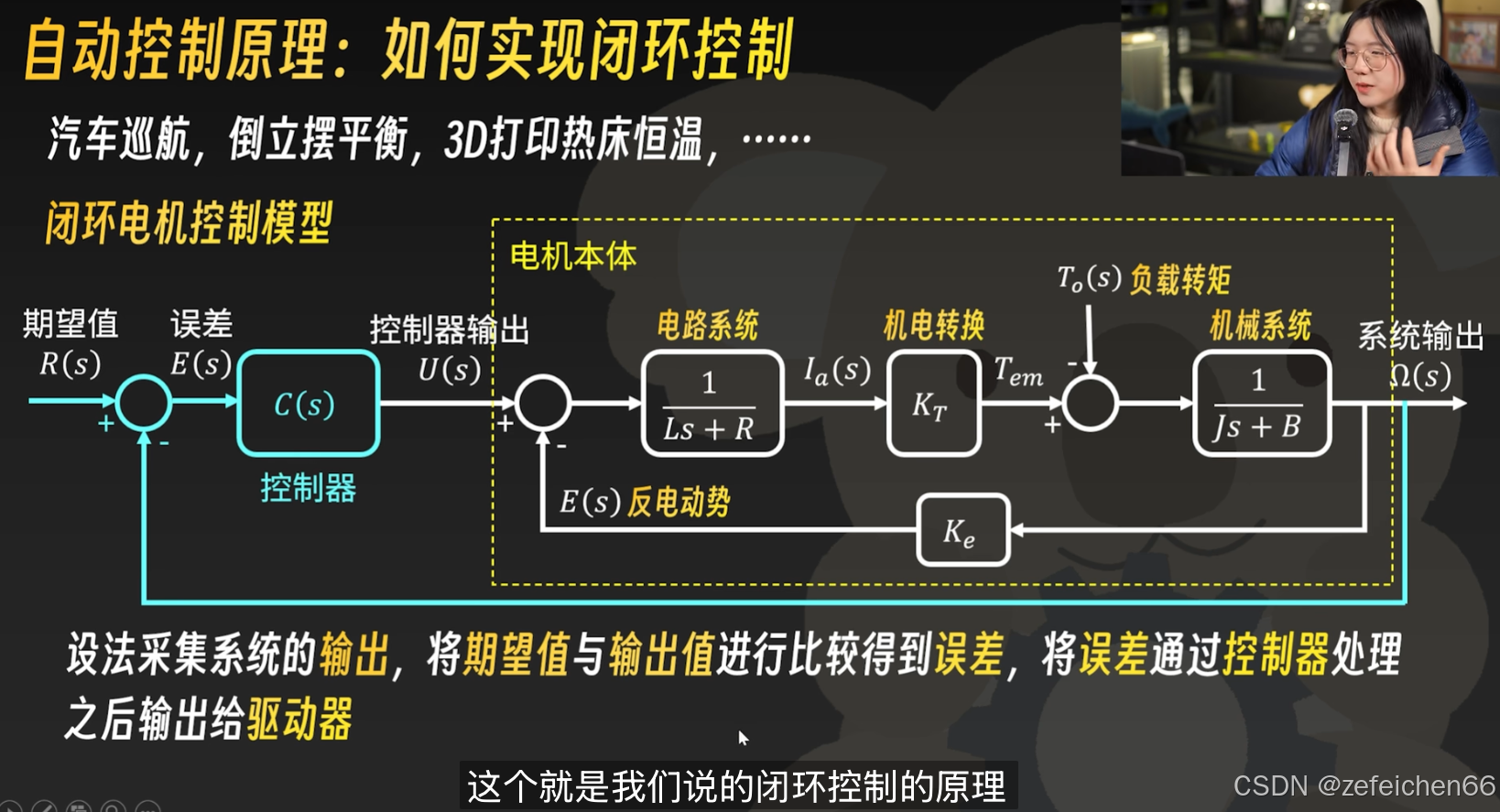
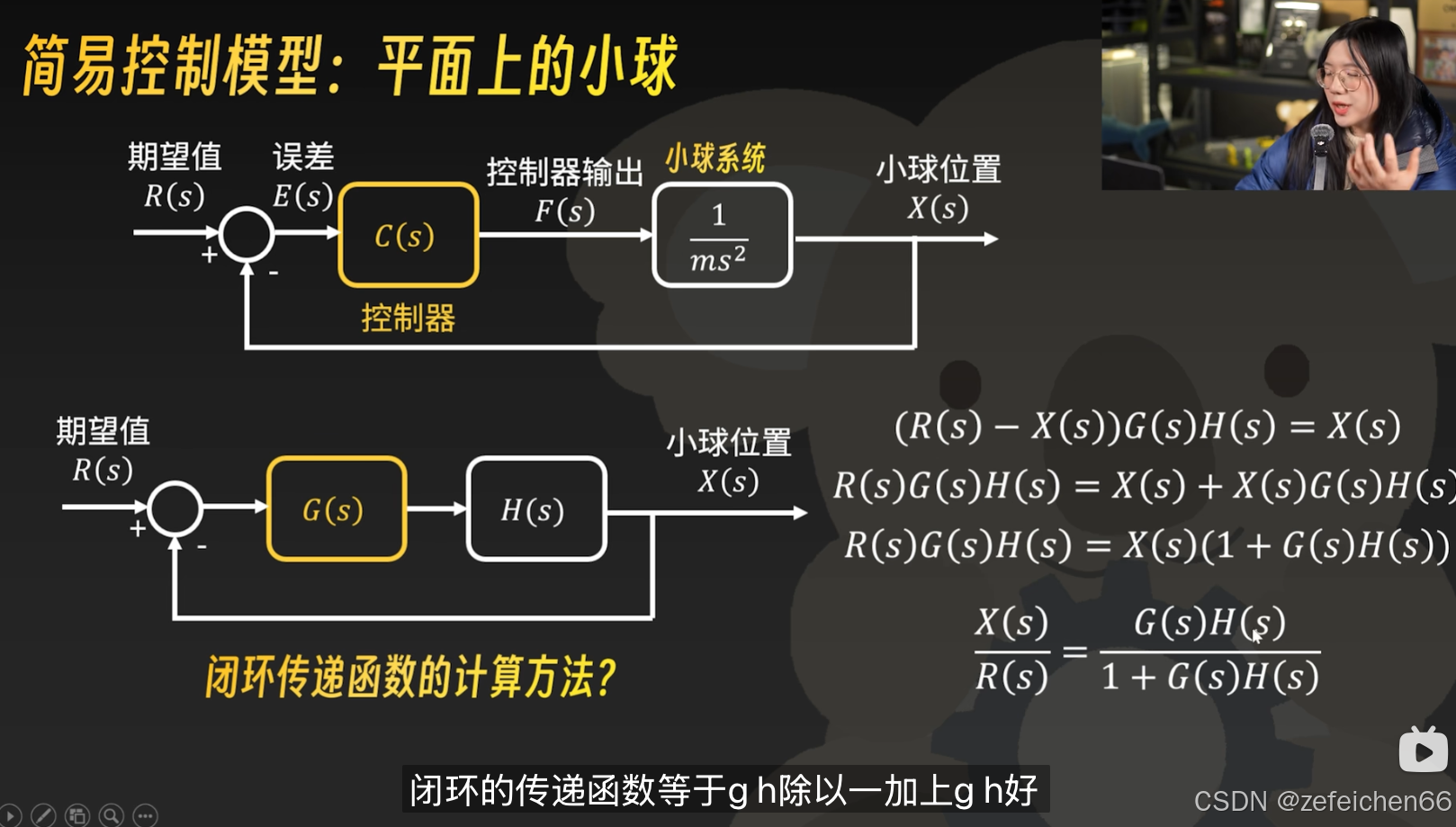
PID控制底层原理是什么?传递函数又传递了什么?线性系统分析与控制课程 | 自动控制原理 | 考拉学姐讲机电控制
游戏
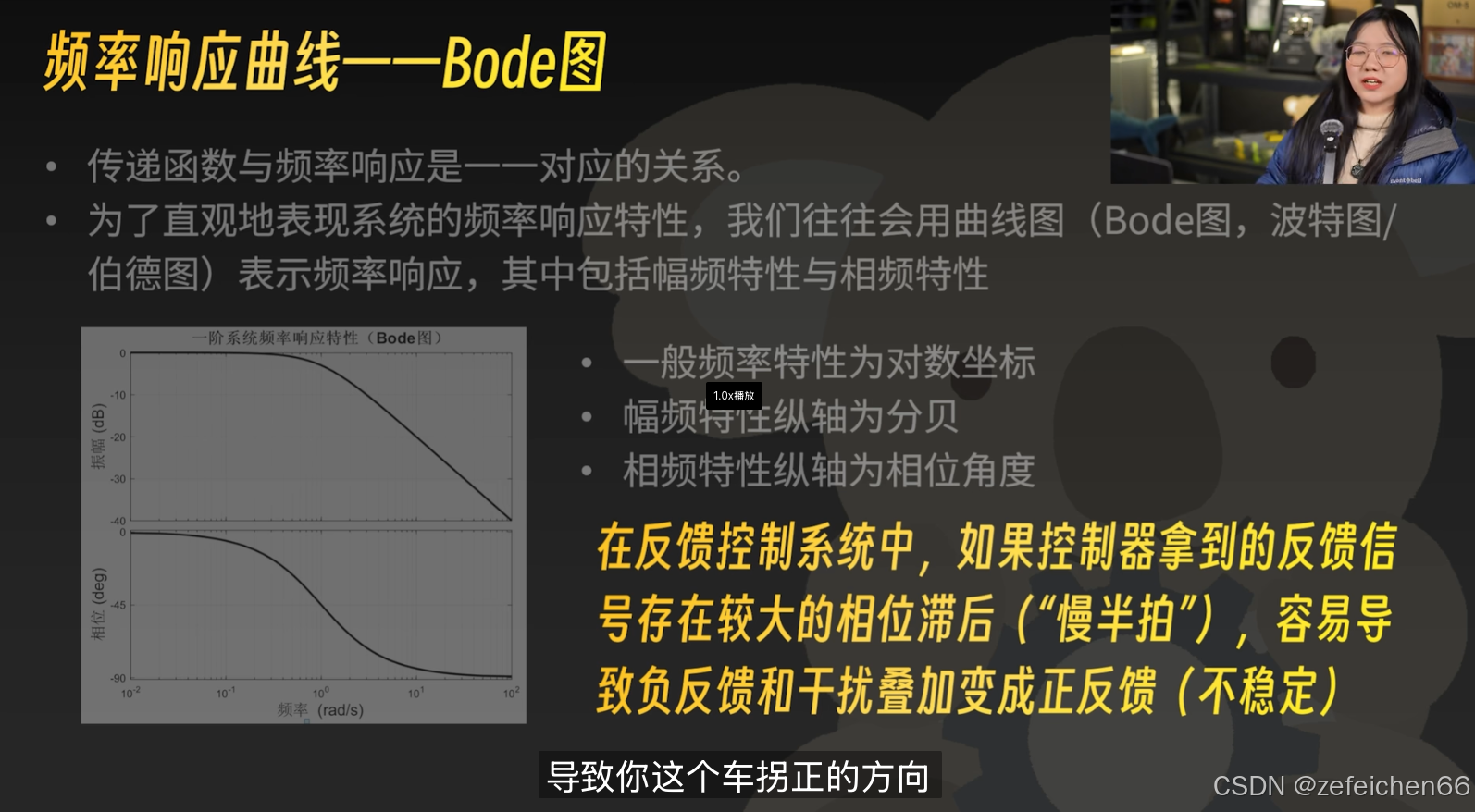
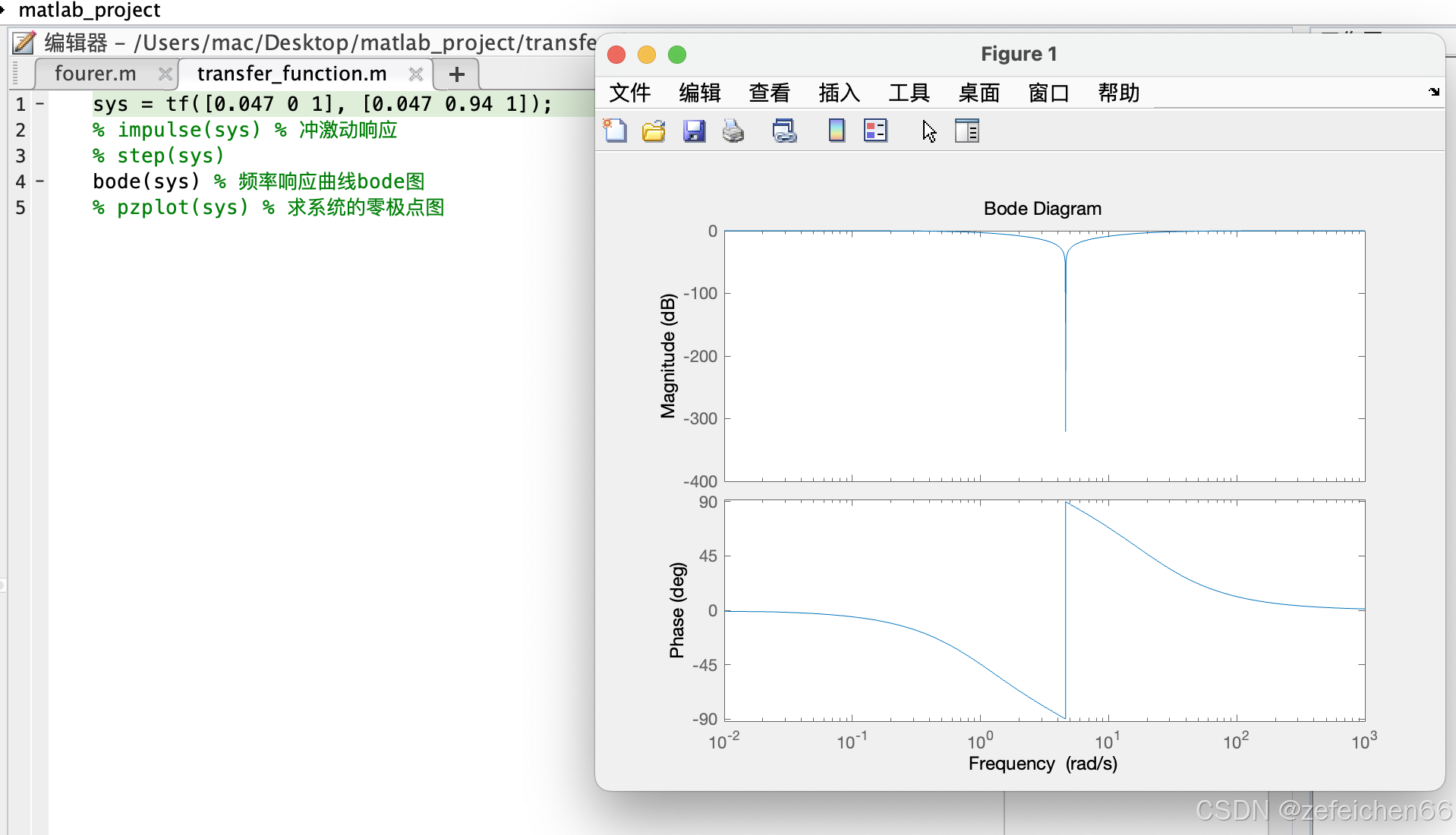
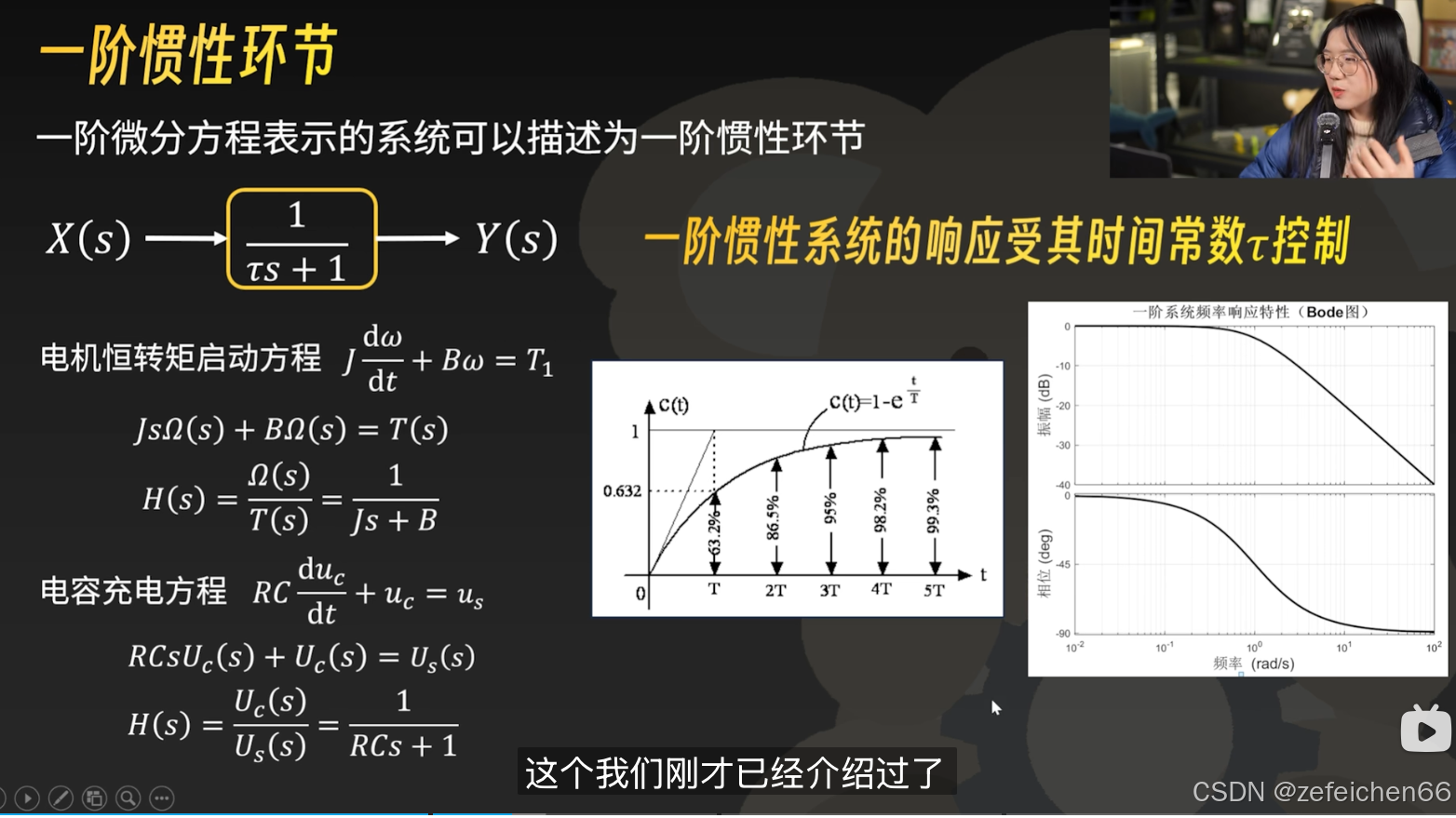
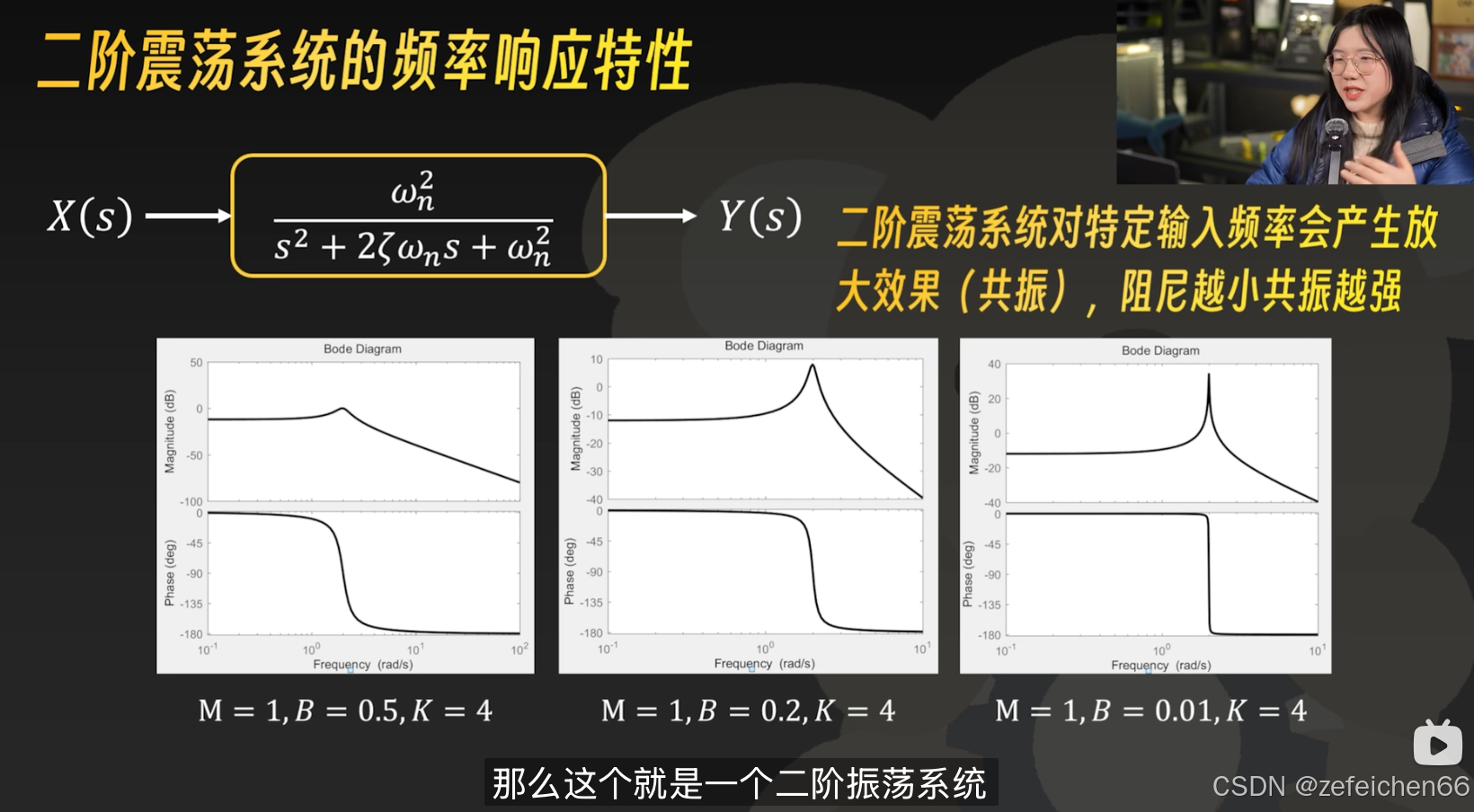
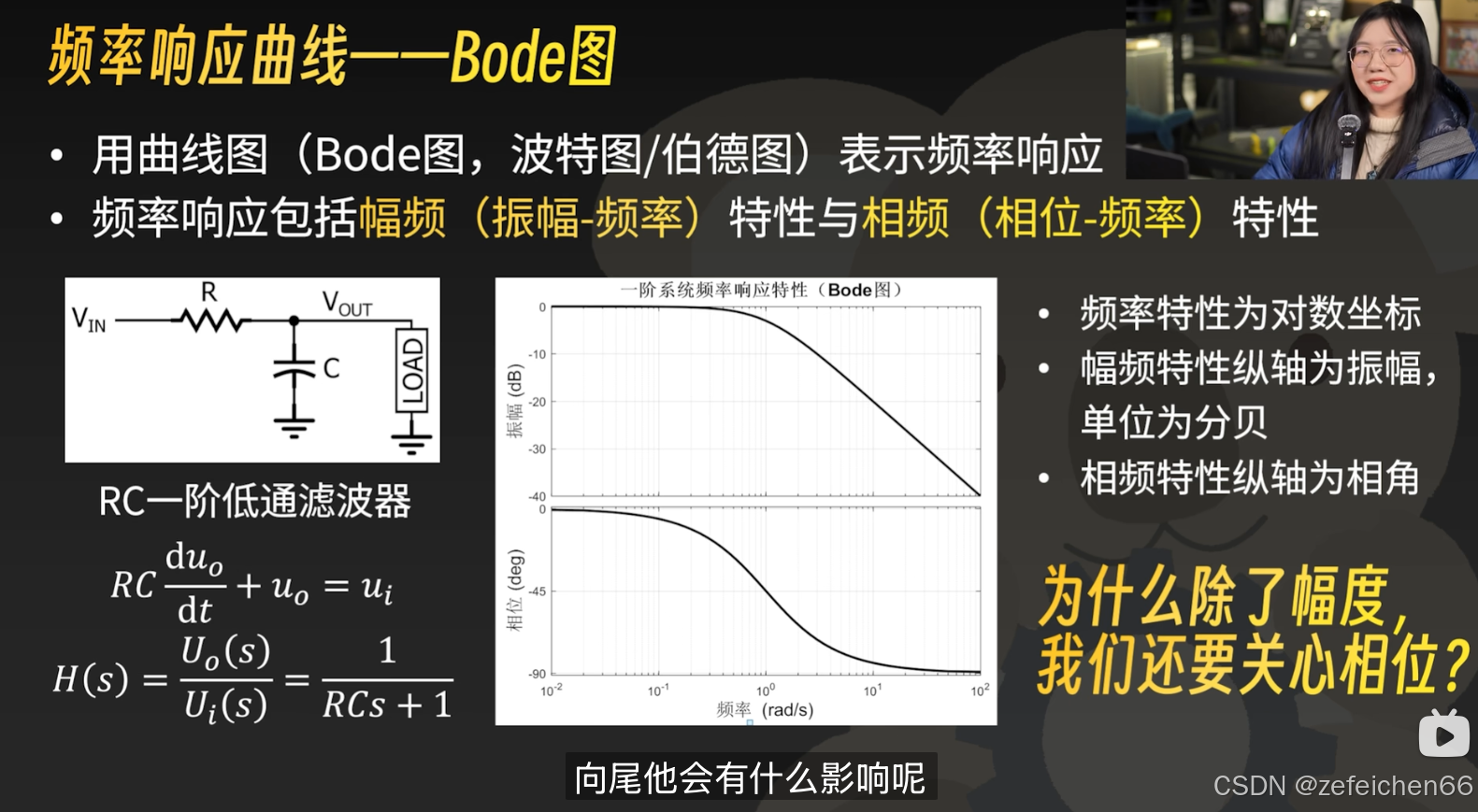
伯德图是系统频率响应的一种图示方法。伯德图由幅值图和相角图组成,两者都按频率的对数分度绘制,故伯德图常也称为对数坐标图。伯德图描述了在电路中输入信号频率变化对输出信号的影响,表达了控制系统输出信号对输入信号频率响应两方面的变化:增益和相位。增益的单位分贝,简单可以理解为输出信号比输入信号的放大倍数。电压分贝和放大倍数有直接的对应关系,用y表示电压分贝,用x表示放大倍数,y=20lg(x)
如何看懂波特图
伯德图Ⅰ:怎么理解伯德图Bode Plot

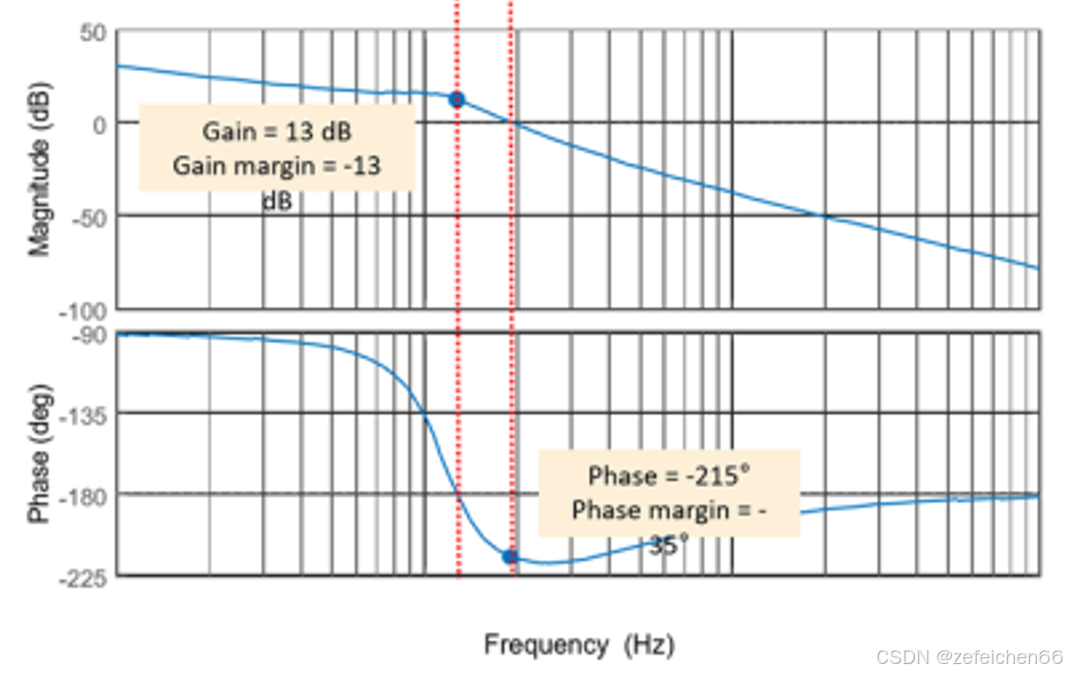
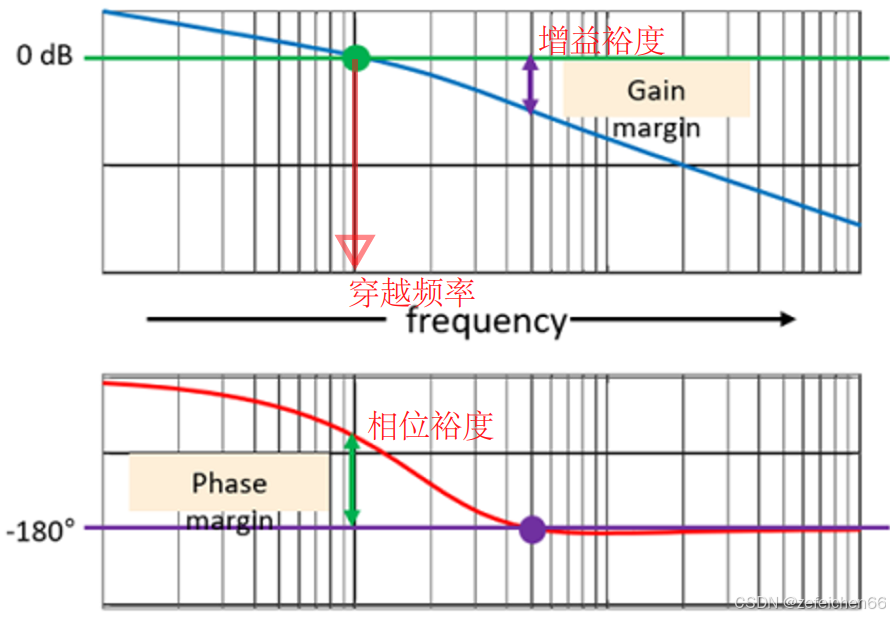
增益裕度和相位裕度
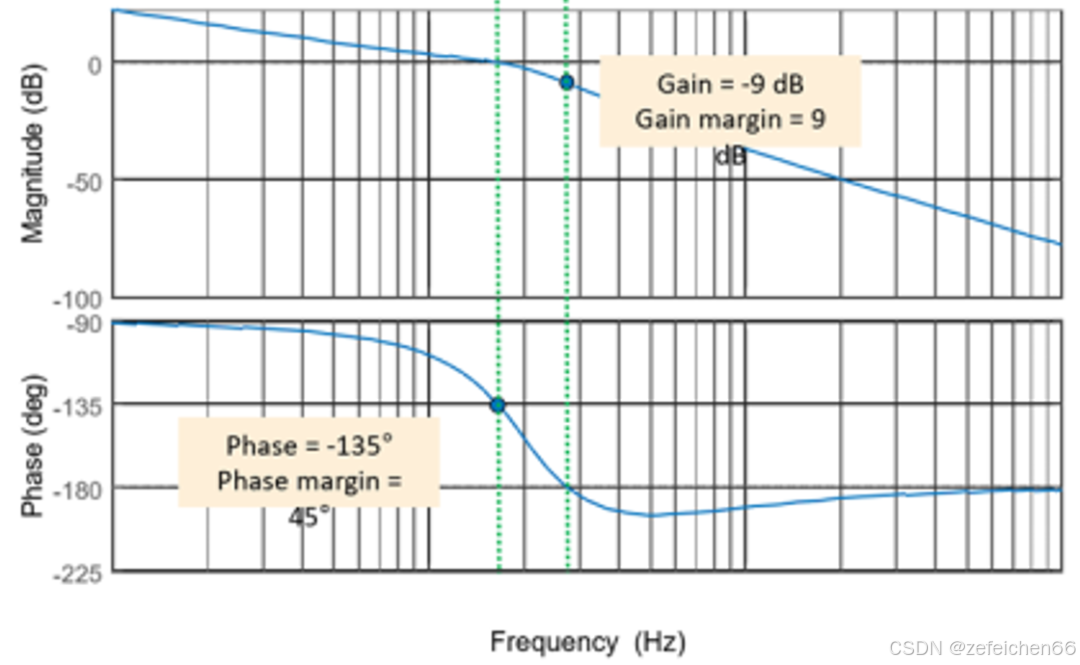
在增益为0dB处,对应穿越频率,对应着相位裕度。相位裕度是相位响应曲线在穿越频率点与-180度之间的相位差。
在相位为180度处,对应着增益裕度。增益裕度是增益响应曲线在相位为-180度的频率点与0dB之间的增益差。
相位裕度、增益裕度表征着系统与不稳定性的“距离”。相位裕度、增益裕度越大,说明控制系统越强健,越稳定。
当然,如果相位裕度过大,意味着系统的响应速度慢,所以需要将相位裕度调整到合理范围内。
下图在穿越频率处(0dB),相位裕度为45°。在相位为-180°处,增益裕度为9,可判断为稳定系统。
下图在穿越频率处(0dB),相位裕度为35°。在相位为-180°处,增益裕度为-13,可判断为不稳定系统。