初始ARM
ARM最基础的组成单元。
最小系统:能系统能够正常工作的最少器件构成的系统 。

一、CPU基础定义

1. 核心定位
- 计算机三大核心部件:
- CPU(运算与控制)
- 内部存储器(数据存储)
- 输入/输出设备(数据交互)

2. 核心功能
| 功能类型 | 说明 | 典型操作示例 |
|---|---|---|
| 指令解释 | 解析机器码指令 | MOV R0, #0x12 |
| 算术运算 | 执行加减乘除运算 | ADD R1, R2, R3 |
| 逻辑控制 | 实现分支跳转与循环 | BNE loop_label |
| 数据存取 | 管理寄存器与内存交互 | LDR R4, [R5] |
二、指令集架构详解
1. 指令集分类对比
| 特性 | CISC(复杂指令集) | RISC(精简指令集) |
|---|---|---|
| 指令复杂度 | 单指令多操作(如字符串处理) | 单指令单操作 |
| 指令长度 | 变长(1-15字节) | 定长(4字节为主) |
| 执行周期 | 多周期指令占比高 | 单周期指令为主 |
| 典型代表架构 | x86(Intel/AMD) | ARM/RISC-V/PowerPC |
| 应用场景 | 桌面/服务器 | 移动设备/嵌入式系统 |
2. 指令执行流程
graph LRA[取指] --> B[译码]B --> C[执行]C --> D[访存]D --> E[写回]
三、核心寄存器体系
1. 关键专用寄存器
| 寄存器 | 功能说明 | 操作示例 |
|---|---|---|
| PC | 存储下条指令地址 | 0x8000_1004 → 0x8000_1008 |
| LR | 保存函数返回地址 | BL func → LR=0x8000_2000 |
| SP | 堆栈顶地址指针 | PUSH {R0} → SP-=4 |
2. 寄存器位宽演进
| 位宽 | 寻址空间 | 典型处理器 | 技术特点 |
|---|---|---|---|
| 8-bit | 64KB | Intel 8080 | 单任务简单控制 |
| 16-bit | 1MB | Intel 80286 | 段式内存管理 |
| 32-bit | 4GB | ARM Cortex-A8 | 虚拟内存支持 |
| 64-bit | 16EB(艾字节) | Apple M1 | 高级SIMD指令集 |
四、异常处理机制
1. 异常分类
| 类型 | 触发条件 | 处理优先级 |
|---|---|---|
| 复位异常 | 系统上电/硬件复位 | 最高 |
| 硬件中断 | 外设触发(如定时器) | 高 |
| 软件异常 | 非法指令/除零错误 | 中 |
| 系统调用 | SVC指令主动触发 | 可配置 |
五、SoC定义解析

1. 狭义定义
- 核心特征:将计算机系统的关键部件集成到单一芯片中
- 典型集成模块:
- 中央处理器(CPU)
- 图形处理器(GPU)
- 数字信号处理器(DSP)
- 存储器(SRAM/DRAM)
- 外设控制器(USB/PCIe)
- 专用硬件加速模块
2. 广义定义
| 传统系统 | SoC系统 | 核心差异 |
|---|---|---|
| 多芯片分立设计 | 单芯片集成设计 | 集成度提升10-100倍 |
| 板级互连 | 片上总线互连 | 传输延迟降低90% |
| 厘米级尺寸 | 毫米级尺寸 | 体积缩小至1/100 |
六、数据和指令类型
数据类型
ARM 架构采用 32 位架构,支持以下数据类型:
-
Byte(字节)
-
8 位(bits)
-
1 字节(byte)
-
-
Halfword(半字)
-
16 位(bits)
-
2 字节(2 bytes)
-
-
Word(字)
-
32 位(bits)
-
4 字节(4 bytes)
-
-
Doubleword(双字)
-
64 位(bits)
-
8 字节(8 bytes)
-
仅在 Cortex-A 处理器中支持。
-
指令类型
ARM 架构支持两种主要的指令集:
-
ARM 指令集
-
32 位固定长度的指令。
-
适用于高性能计算场景。
-
-
Thumb 指令集
-
16 位固定长度的指令。
-
适用于低功耗和存储受限的场景。
-
Cortex-A 处理器
Cortex-A 处理器支持以下指令集:
-
Thumb-2 指令集
-
混合指令集,支持 16 位和 32 位指令。
-
兼具 Thumb 指令集的存储效率和 ARM 指令集的性能。
-
-
ThumbEE 指令集
-
为嵌入式应用优化的指令集,支持 16 位和 32 位指令。
-
提供额外的指令扩展,适用于动态语言和虚拟机。
-
Jazelle 核心
Jazelle 核心支持:
-
Java bytecode
-
用于直接执行 Java 字节码,提高 Java 应用的性能。
-
七、ARM 基本工作模式

-
User 模式
-
描述:非特权模式,大部分应用程序在此模式下运行。
-
特点:权限受限,无法直接访问硬件或执行特权指令。
-
-
FIQ 模式(Fast Interrupt Request)
-
描述:用于处理高优先级中断。
-
触发条件:当高优先级中断(FIQ)发生时进入。
-
特点:快速响应中断,适合实时性要求较高的场景。
-
-
IRQ 模式(Interrupt Request)
-
描述:用于处理普通优先级中断。
-
触发条件:当普通中断(IRQ)发生时进入。
-
特点:适合处理一般的中断请求。
-
-
Supervisor 模式
-
描述:特权模式,用于操作系统或管理程序。
-
触发条件:复位或执行软中断指令(SWI)时进入。
-
特点:提供对硬件的完全访问权限,适合操作系统内核。
-
-
Abort 模式
-
描述:用于处理存储器访问异常。
-
触发条件:当存储器访问异常(如非法地址访问)发生时进入。
-
特点:允许处理器捕获和处理存储器访问错误。
-
-
Undef 模式(Undefined Instruction)
-
描述:用于处理未定义指令。
-
触发条件:当执行未定义指令时进入。
-
特点:允许处理器捕获和处理非法指令。
-
-
System 模式
-
描述:特权模式,与 User 模式共享寄存器集。
-
触发条件:通常由操作系统使用,用于特权级任务。
-
特点:与 User 模式共享寄存器,但具有特权访问权限。
-
Cortex-A 特有模式
-
Monitor 模式
-
描述:特权模式,用于安全监控代码的执行。
-
触发条件:由安全扩展(TrustZone)触发。
-
特点:支持安全和非安全世界的切换,确保系统安全。
-
八、ARM 寄存器
RM 处理器共有 37 个寄存器,分为以下几类:
-
通用寄存器(r0-r12)
-
r0-r12:用于数据存储和计算。
-
r13 (sp):堆栈指针(Stack Pointer)。
-
r14 (lr):链接寄存器(Link Register),用于存储子程序返回地址。
-
r15 (pc):程序计数器(Program Counter),指向当前执行指令的地址。
-
-
状态寄存器
-
cpsr:当前程序状态寄存器(Current Program Status Register),包含标志位(如 N、Z、C、V)。
-
spsr:保存的程序状态寄存器(Saved Program Status Register),在异常处理时保存 cpsr 的值。
-
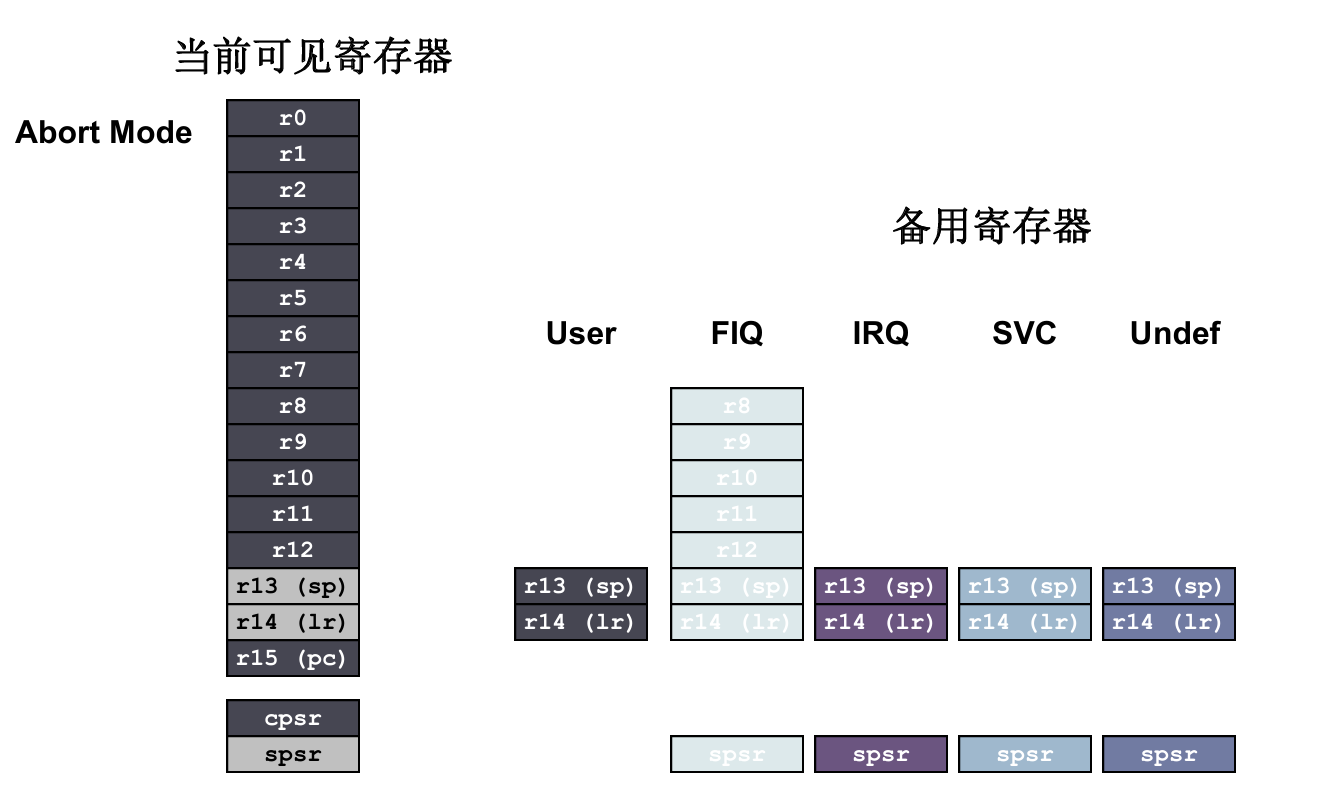
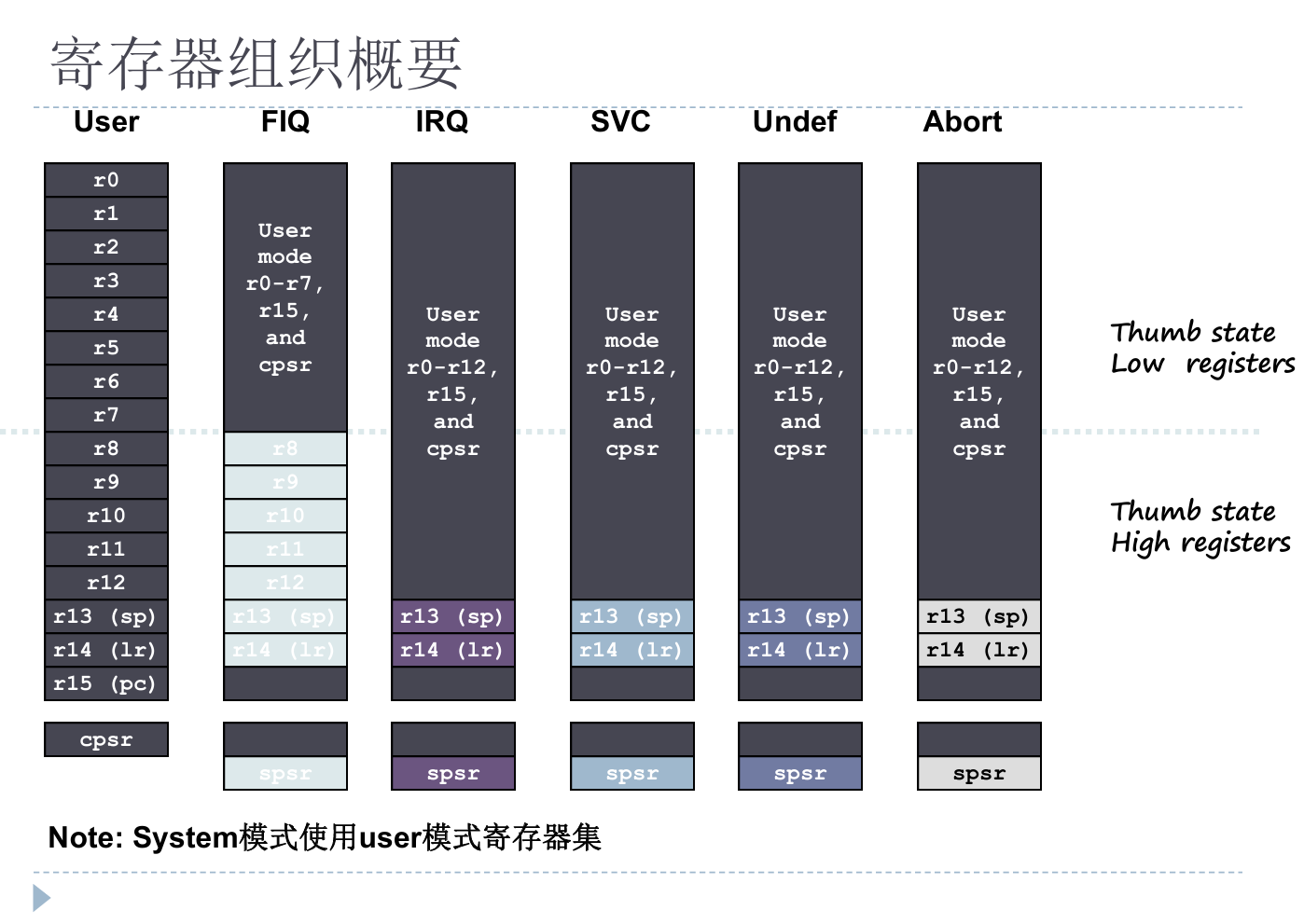
寄存器在不同模式下的分布
ARM 处理器根据不同的工作模式提供不同的寄存器集。以下是各模式下的寄存器分布:
-
User 模式
-
寄存器:r0-r12, r13 (sp), r14 (lr), r15 (pc), cpsr。
-
特点:非特权模式,权限受限。
-
-
FIQ 模式
-
寄存器:r0-r7, r8-r12(专用寄存器),r13 (sp), r14 (lr), r15 (pc), cpsr, spsr。
-
特点:快速中断模式,拥有额外的寄存器(r8-r12)以减少中断处理时的上下文切换。
-
-
IRQ 模式
-
寄存器:r0-r12, r13 (sp), r14 (lr), r15 (pc), cpsr, spsr。
-
特点:普通中断模式,与 User 模式共享大部分寄存器。
-
-
SVC 模式
-
寄存器:r0-r12, r13 (sp), r14 (lr), r15 (pc), cpsr, spsr。
-
特点:超级用户模式,用于操作系统内核。
-
-
Undef 模式
-
寄存器:r0-r12, r13 (sp), r14 (lr), r15 (pc), cpsr, spsr。
-
特点:未定义指令模式,用于处理非法指令。
-
-
Abort 模式
-
寄存器:r0-r12, r13 (sp), r14 (lr), r15 (pc), cpsr, spsr。
-
特点:存储器访问异常模式。
-
Thumb 状态
-
Thumb 状态低寄存器:r0-r7。
-
Thumb 状态高寄存器:r8-r15。
-
特点:在 Thumb 状态下,处理器使用 16 位指令集,寄存器访问受限。
System 模式
-
寄存器:与 User 模式共享相同的寄存器集。
-
特点:特权模式,用于操作系统任务。
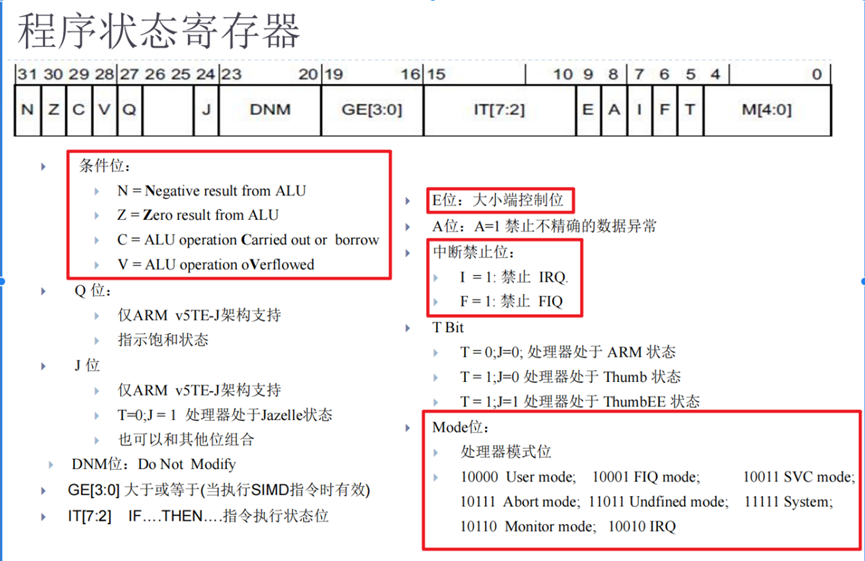
 九、程序状态寄存器
九、程序状态寄存器
-
条件位:用于表示 ALU 操作的结果。
-
控制位:用于控制处理器的行为,如大小端模式、中断禁止、指令集状态等。
-
模式位:用于指示处理器的工作模式,包括 User、FIQ、IRQ、SVC、Abort、Undef、System 和 Monitor 模式。
条件位(Condition Flags)
-
N(Negative):ALU 操作结果为负时置位。
-
Z(Zero):ALU 操作结果为零时置位。
-
C(Carry):ALU 操作中发生了进位或借位时置位。
-
V(Overflow):ALU 操作中发生了溢出时置位。
控制位
-
Q 位:仅在 ARM v5TE-J 架构中支持,用于指示饱和状态。
-
J 位:仅在 ARM v5TE-J 架构中支持,用于指示处理器处于 Jazelle 状态。
-
DNM 位(Do Not Modify):保留位,不修改。
-
GE[3:0] 位:大于或等于标志位,当执行 SIMD 指令时有效。
-
IT[7:2] 位:IF...THEN... 指令执行状态位,用于控制条件执行。
大小端控制位(E 位)
-
E 位:控制处理器的大小端模式。
-
E=0:小端模式(Little-endian)。
-
E=1:大端模式(Big-endian)。
-
中断禁止位
-
A 位:禁止不精确的数据异常。
-
A=1:禁止不精确的数据异常。
-
-
I 位:禁止 IRQ 中断。
-
I=1:禁止 IRQ 中断。
-
-
F 位:禁止 FIQ 中断。
-
F=1:禁止 FIQ 中断。
-
T 位(Thumb 状态位)
-
T 位:指示处理器的指令集状态。
-
T=0, J=0:处理器处于 ARM 状态。
-
T=1, J=0:处理器处于 Thumb 状态。
-
T=0, J=1:处理器处于 Jazelle 状态。
-
T=1, J=1:处理器处于 ThumbEE 状态。
-
模式位(M[4:0])
-
模式位:指示处理器的工作模式。
-
10000:User 模式。
-
10001:FIQ 模式。
-
10010:IRQ 模式。
-
10011:SVC 模式。
-
10111:Abort 模式。
-
11011:Undef 模式。
-
11111:System 模式。
-
10110:Monitor 模式。
-
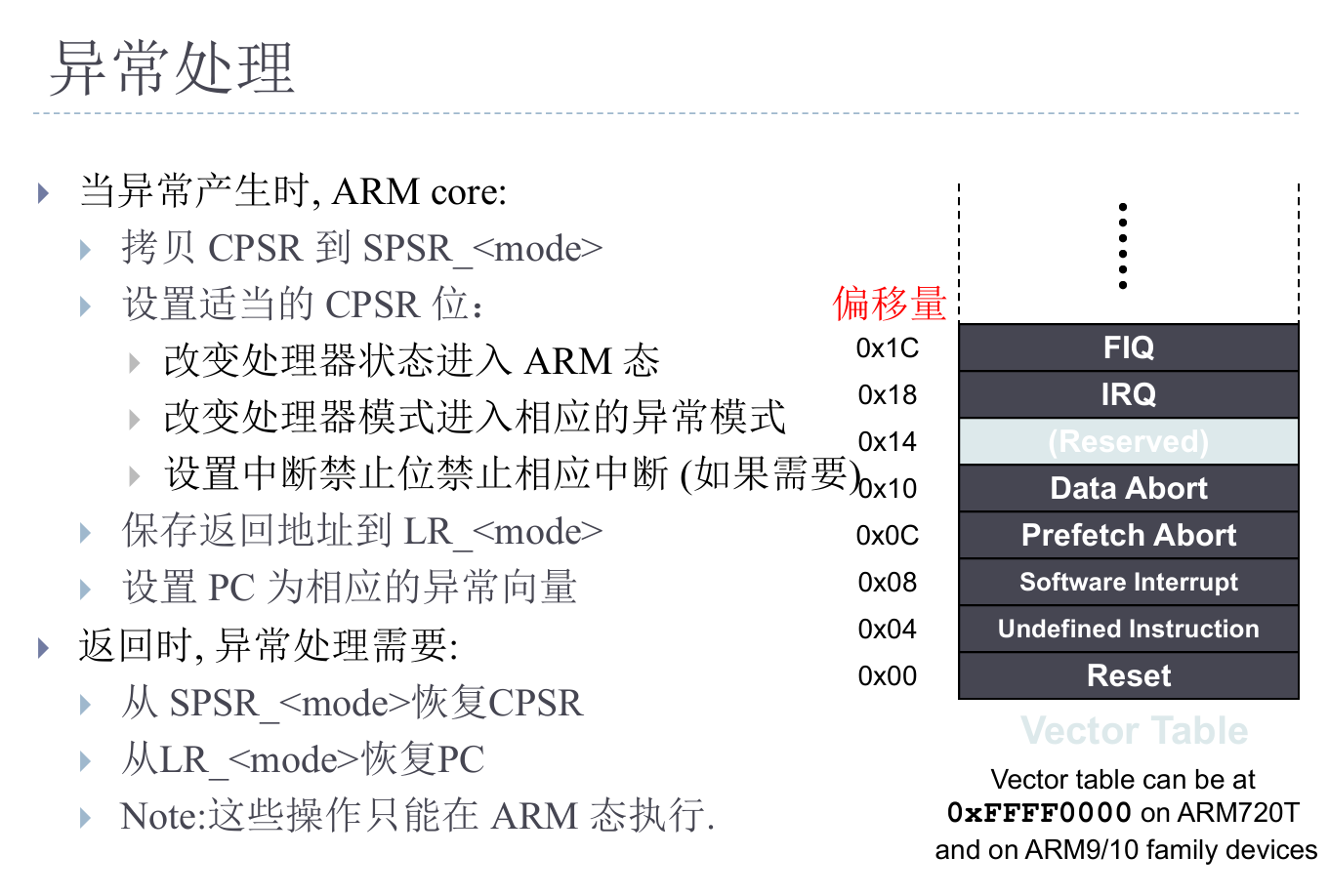
十、异常处理
-
异常处理流程:保存当前状态、设置异常模式、保存返回地址、设置异常向量。
-
异常向量表:用于快速定位异常处理程序的入口地址。
-
异常返回:恢复状态和程序计数器以恢复正常执行。
十一、总结上文
1. ARM 可以工作的模式名字
ARM 处理器有以下工作模式:
-
User 模式:非特权模式。
-
FIQ 模式:快速中断请求模式。
-
IRQ 模式:普通中断请求模式。
-
Supervisor 模式:超级用户模式(特权模式)。
-
Abort 模式:存储器访问异常模式。
-
Undef 模式:未定义指令模式。
-
System 模式:特权模式,与 User 模式共享寄存器集。
-
Monitor 模式(Cortex-A 特有):安全监控模式。
2. ARM 核有多少个寄存器?
ARM 处理器共有 37 个寄存器,包括通用寄存器、状态寄存器和专用寄存器。
3. 什么寄存器用于存储 PC 和 LR 寄存器?
-
PC(程序计数器):由寄存器 r15 存储。
-
LR(链接寄存器):由寄存器 r14 存储。
4. R13 通常用来存储什么?
R13 通常用作 堆栈指针(sp),用于管理堆栈操作。
5. 哪种模式使用的寄存器最少?
User 模式 和 System 模式 使用的寄存器最少,因为它们共享相同的寄存器集。
6. 在 Thumb 指令集中,哪些寄存器处于 Low group?
在 Thumb 指令集中,r0-r7 属于 Low group 寄存器。
7. CPSR 的哪一位反映了处理器的状态?
CPSR 的 T 位 反映处理器的指令集状态:
-
T=0:处理器处于 ARM 状态。
-
T=1:处理器处于 Thumb 状态。
8. 所有的 Thumb 指令采取什么对齐方式?
所有 Thumb 指令采用 2 字节对齐。
9. ARM 有哪几个异常类型?
ARM 支持以下异常类型:
-
Reset:复位。
-
Undefined Instruction:未定义指令。
-
Software Interrupt:软中断(SWI)。
-
Prefetch Abort:预取异常。
-
Data Abort:数据访问异常。
-
IRQ:普通中断请求。
-
FIQ:快速中断请求。
10. 为什么 FIQ 的服务程序地址要位于 0x1C?
FIQ 的服务程序地址位于 0x1C 是因为:
-
异常向量表的偏移量分配中,FIQ 对应的偏移量是 0x1C。
-
这种分配方式确保 FIQ 可以快速响应高优先级中断。
11. 在复位后,ARM 处理器处于何种模式、何种状态?
复位后,ARM 处理器会:
-
进入 Supervisor 模式。
-
处于 ARM 状态。
十二、ARM 处理器指令流水线
流水线概述
ARM7 系列处理器使用 3 级流水线 来提高指令流的执行速度。流水线允许多个操作同时处理,而非顺序执行。
流水线阶段
-
Fetch(取指)
-
从存储器中读取指令。
-
在 ARM 状态下,PC 指向当前指令地址。
-
在 Thumb 状态下,PC 指向当前指令地址减去偏移量。
-
-
Decode(解码)
-
解码指令,确定指令中使用的寄存器。
-
在 ARM 状态下,PC 指向当前指令地址减去 4 字节。
-
在 Thumb 状态下,PC 指向当前指令地址减去 2 字节。
-
-
Execute(执行)
-
执行指令,包括寄存器读取、移位操作、ALU 操作和寄存器写回。
-
在 ARM 状态下,PC 指向当前指令地址减去 8 字节。
-
在 Thumb 状态下,PC 指向当前指令地址减去 4 字节。
-
PC 的行为
-
PC 指向正被取指的指令,而非正在执行的指令。
-
在 ARM 状态下,PC 值比正在执行的指令地址大 8 字节。
-
在 Thumb 状态下,PC 值比正在执行的指令地址大 4 字节。
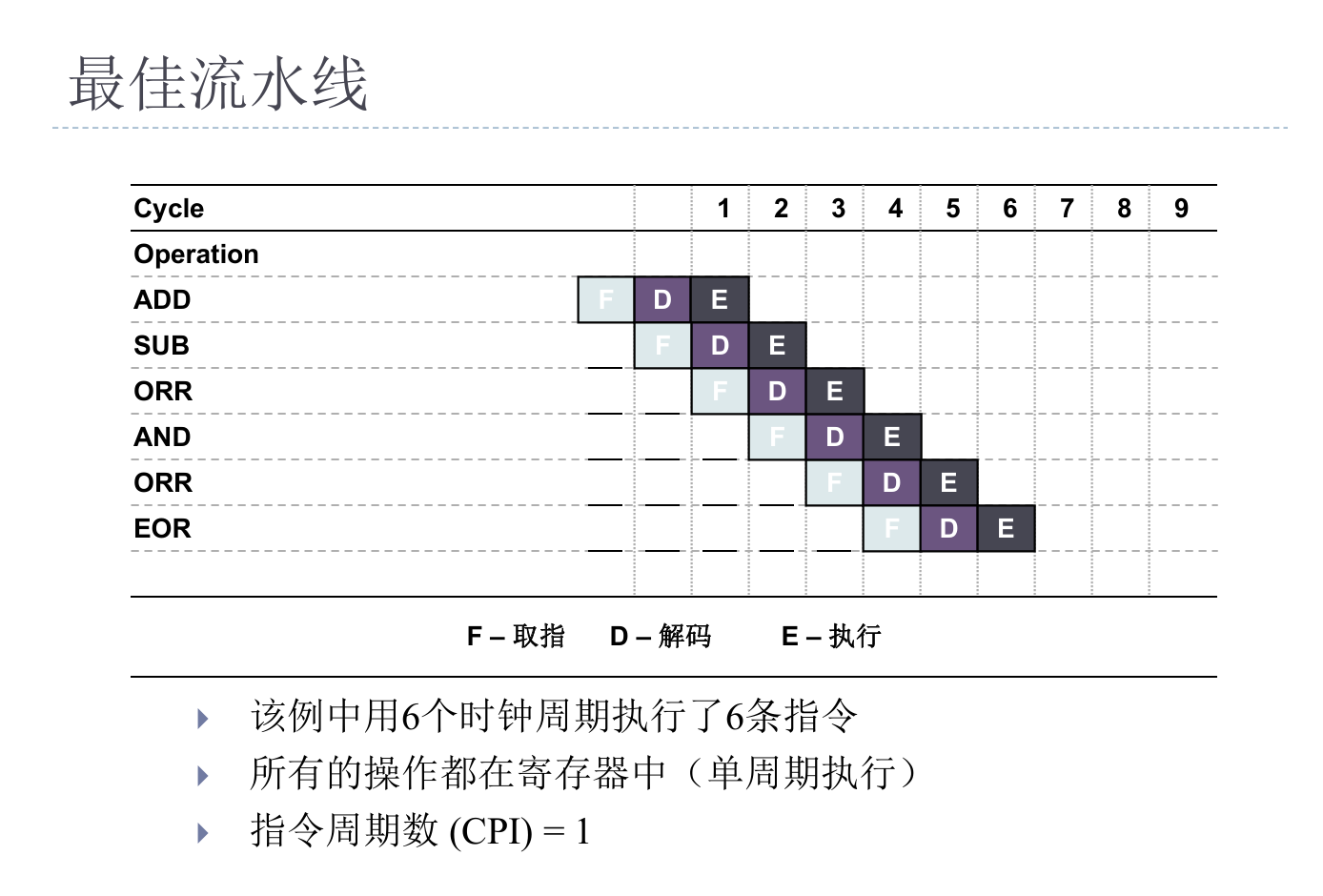
性能指标
-
时钟周期:6 个时钟周期内执行了 6 条指令。
-
CPI(每条指令的时钟周期数):1。
总结
-
流水线优点:通过并行处理多个指令,显著提高了处理器的执行效率。
-
理想状态:在理想情况下,每条指令的 CPI 为 1,即每个时钟周期执行一条指令。