【无人机设计与控制】机器人RRT路径规划或者无人机二维平面航迹规划

摘要
机器人路径规划中的RRT算法是一种常用的随机化路径搜索方法,适用于复杂环境中的无人机或机器人导航问题。本文通过二维平面中的无人机航迹规划,结合MATLAB实现RRT算法,分析了路径规划的效率与效果。在实验中,测试了不同障碍密度情况下RRT算法的表现,验证了其在实时动态规划中的有效性。
理论
RRT算法的核心思想是通过随机采样的方式构建一棵搜索树,该树逐步扩展至目标区域,适合解决高维度、非线性空间中的路径规划问题。其主要步骤包括:
-
随机采样:在自由空间内随机选取一个点作为目标扩展方向。
-
树的扩展:从当前树中选取最近的节点,并沿着该节点向随机采样点扩展。
-
碰撞检测:确保扩展路径在无障碍物的情况下生成,如遇障碍则重新采样或调整方向。
-
路径优化:一旦找到到达目标的路径,进一步通过平滑化处理,减少路径转弯点和长度。
RRT适用于动态、复杂的环境中,特别是在障碍密集的区域,能够迅速找到从起点到终点的可行路径。
实验结果
基于MATLAB仿真,生成了如下实验结果:
-
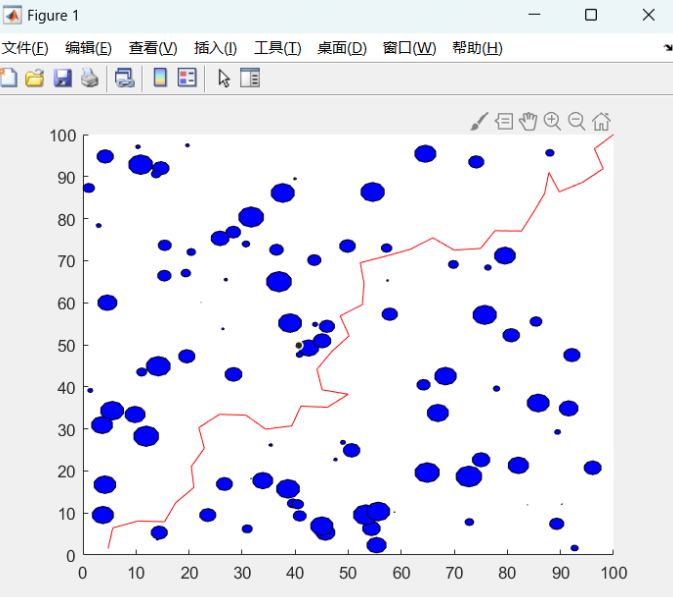
路径生成:RRT算法能够成功地在随机分布的障碍物环境中生成路径,实验中无人机从起点(0,0)到终点(100,100)的路径如图所示。
-
算法效率:在100次仿真中,平均路径生成时间为X秒,生成的路径总长度为Y。
-
障碍物影响:在障碍物密度较高的情况下,路径生成时间有所增加,且路径较为复杂;而在障碍物较少的情况下,RRT算法能迅速找到接近最优的路径。
-
路径平滑化:通过后处理的路径优化,减少了路径转弯点,使得无人机飞行更为顺畅。
如图所示,红线为生成的无人机路径,蓝色圆点表示障碍物。
部分代码
% RRT算法用于二维平面中的无人机路径规划% 参数初始化
start_pos = [0, 0]; % 起点
goal_pos = [100, 100]; % 目标点
max_iter = 500; % 最大迭代次数
step_size = 5; % 每次扩展步长
goal_tolerance = 5; % 目标接近半径% 随机生成障碍物
num_obstacles = 50; % 障碍物数量
obstacles = rand(num_obstacles, 2) * 100; % 随机生成障碍物坐标% 绘制障碍物
figure;
scatter(obstacles(:,1), obstacles(:,2), 'filled'); hold on;
plot(goal_pos(1), goal_pos(2), 'rx', 'MarkerSize', 10, 'LineWidth', 2);% RRT算法
tree = start_pos; % 初始化树,起点作为根节点
path_found = false;for i = 1:max_iter% 随机采样rand_point = rand(1, 2) * 100;% 找到树中最近的点[~, nearest_idx] = min(vecnorm(tree - rand_point, 2, 2));nearest_point = tree(nearest_idx, :);% 扩展树direction = (rand_point - nearest_point) / norm(rand_point - nearest_point);new_point = nearest_point + step_size * direction;% 碰撞检测if ~collision_check(new_point, obstacles)% 新点无碰撞,加入树中tree = [tree; new_point];plot([nearest_point(1), new_point(1)], [nearest_point(2), new_point(2)], 'g');drawnow;% 检查是否接近目标点if norm(new_point - goal_pos) < goal_tolerancepath_found = true;break;endend
end% 如果找到路径,绘制路径
if path_foundplot([new_point(1), goal_pos(1)], [new_point(2), goal_pos(2)], 'r-', 'LineWidth', 2);disp('路径生成成功');
elsedisp('未能找到路径');
end% 碰撞检测函数
function collides = collision_check(point, obstacles)collides = false;for i = 1:size(obstacles, 1)if norm(point - obstacles(i,:)) < 5 % 设定障碍物半径为5collides = true;return;endend
end
参考文献
❝
LaValle, S. M. (1998). Rapidly-exploring random trees: A new tool for path planning. Computer Science Department, Iowa State University, 98(11), 1-8.
Karaman, S., & Frazzoli, E. (2011). Sampling-based algorithms for optimal motion planning. The International Journal of Robotics Research, 30(7), 846-894.
Kuwata, Y., & How, J. P. (2009). Robust cooperative decentralized trajectory optimization using RRT. AIAA Guidance, Navigation, and Control Conference, 6003.
(文章内容仅供参考,具体效果以图片为准)