【MWORKS专业工具箱系列教程】控制系列工具箱第六期:根轨迹分析
本工具箱教程以控制系统模型创建、分析与设计流程为主线,通过大量示例介绍MWORKS控制系统工具箱的功能和具体使用。共计10篇文章,上一篇主要介绍了控制系统频域分析。
同元软控:【MWORKS专业工具箱系列教程】控制系列工具箱第五期:频域分析
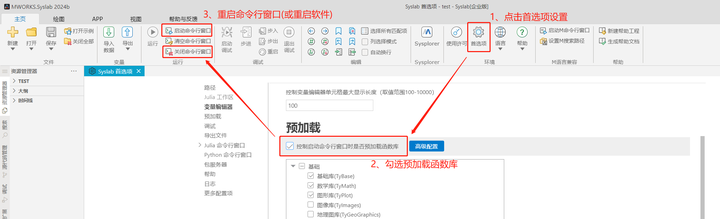
本教程代码均可直接复制到Syslab中运行,使用教程中代码前需参照下述方法加载函数库内容: 方法一:在Syslab的命令行窗口先后输入using TyControlSystems和using TyPlot并回车(重启软件或命令行窗口后需重新输入); 方法二:按照下图中的方法预加载函数库(设置好后每次启动软件默认加载)。
第六期:根轨迹分析
一、什么是根轨迹?
根轨迹是当系统的某个参数从 变化到
时,闭环特征方程的根在
平面上的变化轨迹。
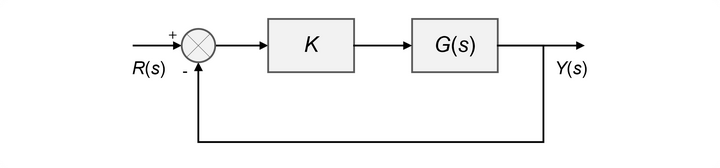
如上图所示简单的单回路系统,其闭环表达式为:

其特征方程为:

其中, 为可变参数,且满足
。随着
的变化,闭环特征方程的根在
平面的轨迹即为系统根轨迹。
二、基于根轨迹法的控制系统设计思路
根轨迹法是经典控制理论的两大核心设计方法之一(另一为频率响应法)
闭环系统瞬态响应的基本特性与闭环特征根(闭环极点)的位置紧密相关。如果系统具有可变的回路增益,则闭环极点的位置取决于所选择的回路增益值。因此,当回路增益变化时,掌握闭环极点在 平面如何移动,对设计控制系统来说很重要。
从控制设计的角度来看,在某些系统中,简单的增益调整可将闭环极点移动到需要的位置,这种情况是将设计问题转变为选择合适的增益值问题。但是,如果仅仅靠增益调整得不到满意的效果,则需要在系统中增加校正器,通过校正器的作用,将闭环极点移动到需要的位置,这部分内容将在本系列第八期:交互式控制系统设计App中进行详细讨论,敬请持续关注。
以上是基于根轨迹法设计控制系统的基本思路。根轨迹法指出了开环极点和零点应当怎样变化才能使系统的响应满足系统的性能指标,特别适合于迅速地获取近似结果。
三、用Syslab绘制根轨迹图
求解三阶以上的特征方程根异常麻烦,Syslab则为该问题提供了一个简便的解法,通过 rlocus 函数即可轻松绘制。
但是,手工方法绘制根轨迹的经验、基本规则,对于理解根轨迹以及通过交互方式设计控制系统都至关重要。
比如:系统闭环根轨迹起始于开环极点,终止于开环零点或无穷远处,通过这一条规则,我们就可大致清楚在增加校正环节后,系统闭环根轨迹的变化趋势。
Syslab的 rlocus 函数用法
| rlocus 调用方式 | 说明 |
|---|---|
| rlocus(sys) | 计算系统根轨迹,并给出根轨迹图,支持时间连续系统与时间离散系统 |
| rlocus(sys, K) | 指定系统开环增益K,计算系统根轨迹,并绘制系统根轨迹图 |
| z, p, k = rlocus(sys, fig = false) | 计算系统根轨迹,不出图。其中: |
| z, p, k = rlocus(sys, K, fig = false) | 计算系统在指定开环增益K下的根轨迹,不出图。其中: |
| pzgrid() | 根轨迹网格开关。pzgrid(true)开启网格,pzgrid(false)关闭网格 |
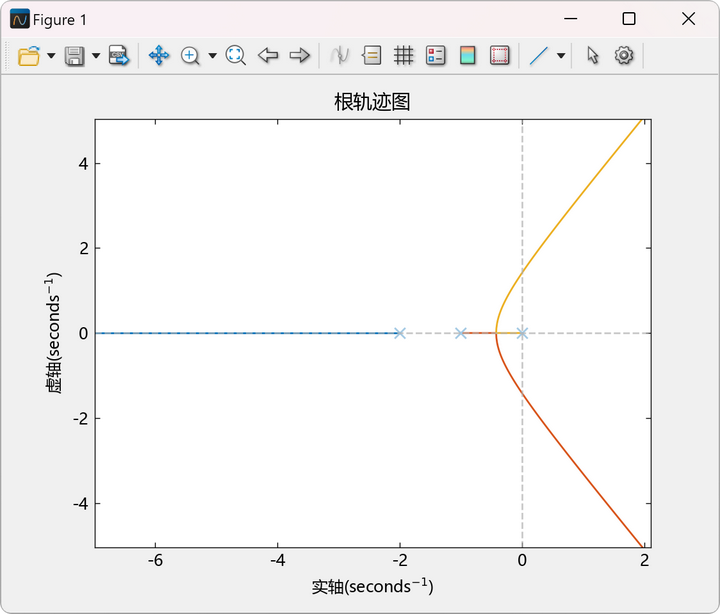
示例33:绘制下图所示系统(假设增益 的值为非负值)的根轨迹图


output:
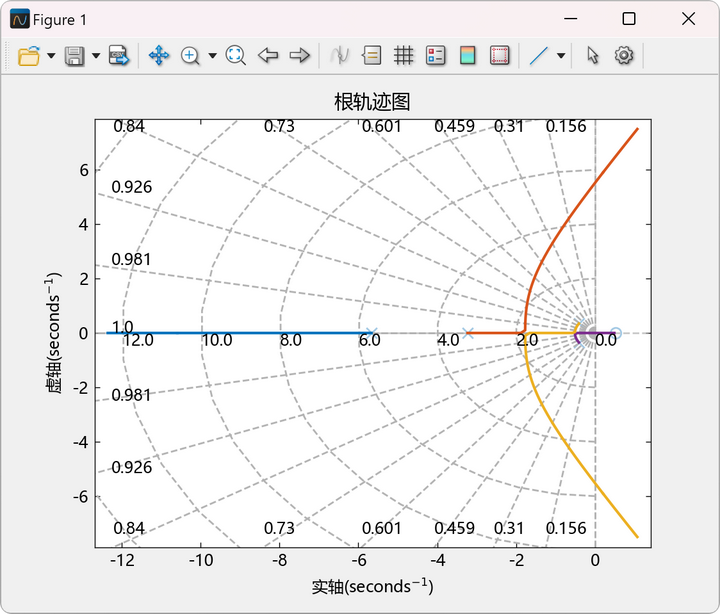
示例34: 绘制以下系统根轨迹,考虑开环增益从 0 到 1000 变化

output:
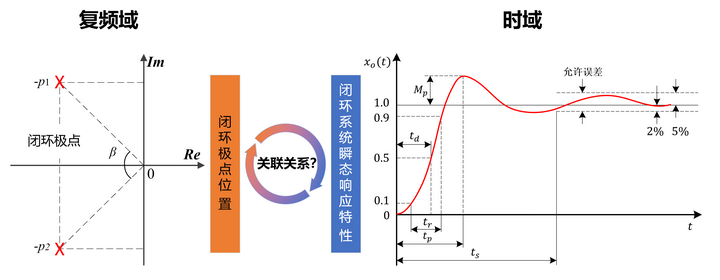
四、闭环极点位置与系统瞬态响应的关联
系统的瞬态响应类型由闭环极点确定,一阶系统简单,其总是稳定的、无震荡、响应单调;而高阶系统的响应一般是由一阶和二阶系统响应的组合构成。所以这里主要讨论闭环极点与二阶系统时域响应性能关系。

那么,闭环极点位置与闭环系统瞬态响应指标之间的关系究竟如何?
上图二阶系统的闭环表达式为:

闭环系统特征方程为:
求解得到系统闭环极点(闭环特征根):

考虑不同阻尼系数对系统的影响
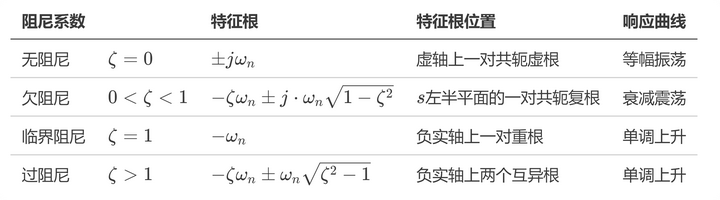
针对二阶欠阻尼系统,其特征根为 左半平面一对共轭复根
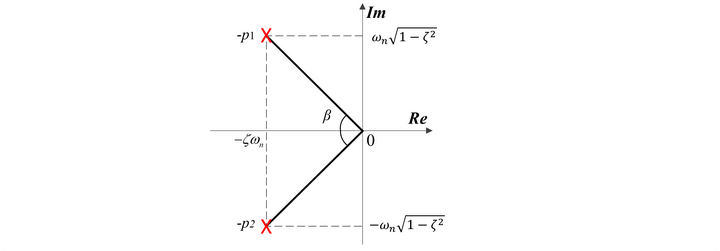
为二阶系统共轭复根对负实轴的张角,显然有以下的关系:
因此, 被称为阻尼角,系统阻尼越大,阻尼角越小
① 最大超调量与闭环极点位置的关系
前文所述二阶系统的单位阶跃响应可表达为:

将其进行拉普拉斯反变换,转化为阶跃响应的时域表达式(过程可自行推导):

二阶欠阻尼系统的最大超调量对应的时间称为峰值时间 ,将
对时间求导,令导数为零,即可求得峰值时间:

假设二阶欠阻尼系统的阶跃响应稳态值为 ,将
代入
,得到系统最大超调量为:

可见,最大超调量仅与系统的阻尼系数相关。我们在时域指标中,经常使用最大超调量百分比 ,比如:
表示系统响应最大超调量为
,因此:

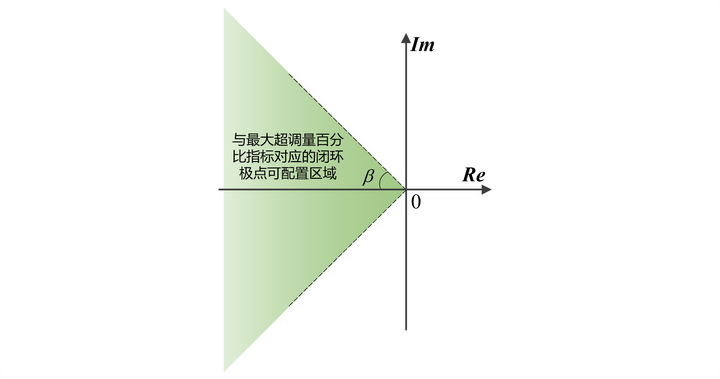
这就意味着,当已知系统最大超调量百分比指标( )后,可以根据式计算系统的阻尼:

根据 即可换算得到系统阻尼角
,进而得到满足不大于所设定的最大超调量百分比所对应的系统闭环极点可配置区域。
② 调整时间与闭环极点位置的关系
上一小节中,已经给出了二阶系统的单位阶跃响应时域表达式,根据表达式分析,瞬态响应曲线的包络线表达式为:

小彩蛋:计算并绘制二阶欠阻尼系统阶跃响应包络线

output:
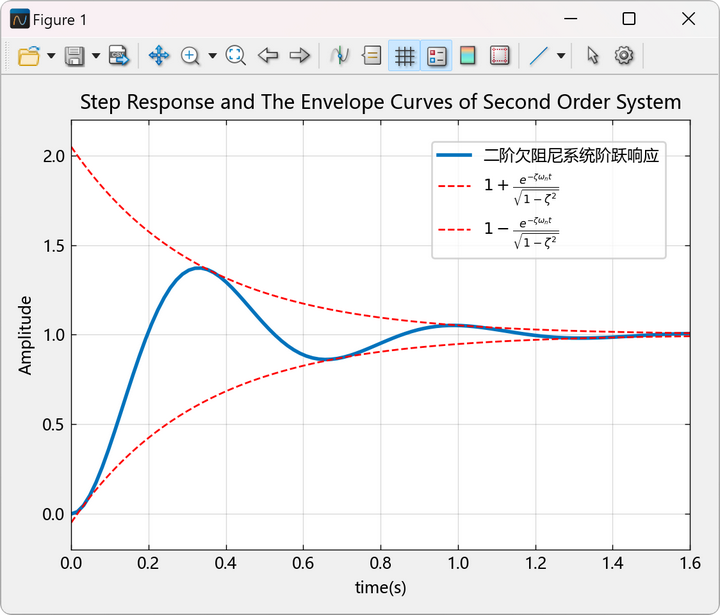
如上图所示,响应曲线总是被包含在一对包络线之内,且这对包络线的时间常数为: ![]() 。瞬态响应的衰减速度取决于时间常数。
。瞬态响应的衰减速度取决于时间常数。
对于给定的 ,调整时间
是阻尼比
的函数。
对于不同的 值,可以测得与
或
允许误差带相对应的调整时间,并以时间常数
的形式来表示。当
时:
-
如果采用
允许误差,则
近似等于系统时间常数的
倍,即:
如果采用 允许误差,则
近似等于系统时间常数的
倍,即:
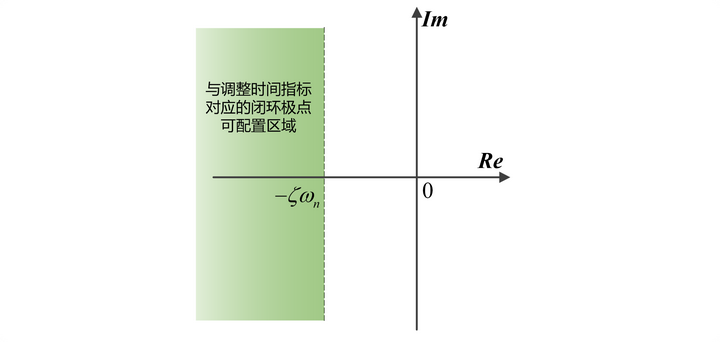
通过本文前部分的分析,我们知道 为二阶欠阻尼系统闭环极点(共轭极点)的实部。
这就意味着,当已知系统瞬态相应调整时间指标( )后,可以根据上述规则计算得到系统闭环极点的可配置区域。
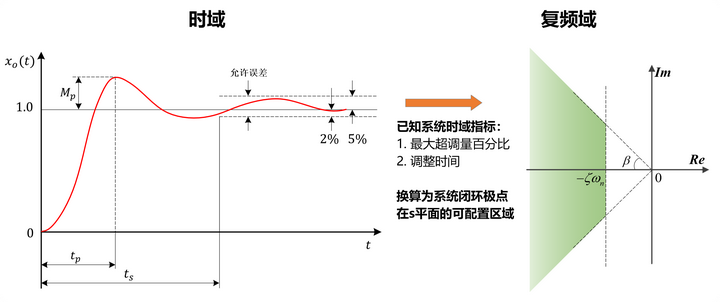
当然,各类时域响应指标都能决定闭环极点在复频域的可配置区域,当一个系统需要满足多个指标,那么各指标对应可配置区域的交集就是可以同时满足所有指标的闭环极点可配置区域。
针对高阶系统进行控制律设计时,常常需要对高阶系统的增益进行调整,以便使系统具有一对闭环主导共轭复数极点,此时,闭环极点将起到相对主导作用。如果实部的比值超过 ,且在极点附近不存在零点,那么距离平面虚轴最近的闭环极点将对瞬态响应起主导作用。在这种情况下,高阶系统可以近似考虑仅由其主导极点构成的二阶系统来近似。
基于根轨迹法的控制器设计,可依据上述分析作为依据参考,结合 Syslab 所绘制的根轨迹图,辅助开展校正环节的设计。
更多有关经典控制理论相关函数请参阅Syslab-控制系统工具箱帮助文档
"Syslab控制系统工具箱-经典控制"帮助文档![]() https://www.tongyuan.cc/help/SyslabHelp.html#/Doc/TyControlSystems/ControlSystemDesignAndTuning/ClassicalControlDesign.html
https://www.tongyuan.cc/help/SyslabHelp.html#/Doc/TyControlSystems/ControlSystemDesignAndTuning/ClassicalControlDesign.html
本系列第七期文章将对PID控制器设计进行详尽解读,敬请关注!