增量式编码器实现原理
目录
概述
1 认识增量式编码器
1.1 概述
1.2 增量式编码器的特性
1.3 编码器的硬件
2 增量式编码器实现原理
2.1 编码器信号
2.2 正反转判断
概述
本文主要介绍增量式编码器实现原理,包括增量式编码器的特性,信号特性,以及如何使用编码器的输出信号判断正反转的方法和位置计算等内容。
1 认识增量式编码器
1.1 概述
增量式编码器是一种用来测量轴的位置、速度和方向的装置。它在机械和自动化系统中广泛应用,例如在机床、机器人、汽车、航空航天等领域。
增量式编码器通过测量轴相对于一个参考点的变化量来确定位置。它包含一个旋转光栅或磁栅和一个光电传感器或磁传感器。当轴旋转时,光栅或磁栅会根据轴的运动而相应地改变其位置。光电传感器或磁传感器会检测到光栅或磁栅的变化,并将其转化为电信号。
增量式编码器的工作原理是利用光栅或磁栅的条纹来产生脉冲。光电传感器或磁传感器会在光栅或磁栅上感应到脉冲的变化,从而测量出轴的运动和位置。脉冲的数量和频率与轴的运动速度和方向有关。
1.2 增量式编码器的特性
1)优点
增量式编码器的优点包括高分辨率、高精度、快速响应和较低的成本。它可以提供准确的位置测量,从而实现精确的控制和定位。在一些应用中,增量式编码器还可以提供速度和加速度的测量。
2)缺点
但是,增量式编码器也有一些限制。由于它只能测量相对于参考点的位置变化,所以在重新启动系统时需要重新校准。此外,增量式编码器对系统的环境条件敏感,例如温度和震动,可能会影响其测量的准确性。
总体而言,增量式编码器是一种常见而有效的位置测量装置,适用于许多不同的应用领域。它可以提供准确的位置、速度和方向测量,从而实现精确的控制和定位。
1.3 编码器的硬件
下图为两款自带增量编码器的电机(图片来自于网络)


补充内容:
1)霍尔编码器
霍尔编码器是一种数字编码器,用于检测旋转运动的方向和位置。它基于霍尔效应,利用霍尔元件来检测磁场的变化。
霍尔效应是指当电流通过一条导线时,如果导线附近存在磁场,那么导线两端会产生一个电势差。这个电势差受到磁场强度和方向的影响。
霍尔编码器由两个或多个霍尔元件组成。这些元件被安置在固定的位置上,附近有一个旋转的磁场源。当磁场源旋转时,它会改变附近的磁场强度和方向。
当旋转的磁场源接近霍尔元件时,会在霍尔元件上产生一个电势差。根据霍尔元件的排列方式,可以判断出旋转的方向是顺时针还是逆时针。同时,根据电势差的大小,可以确定旋转的位置。
霍尔编码器具有高分辨率、快速响应、耐磁场干扰等优点,被广泛应用于机械设备、电动机、汽车导航系统等领域。它在位置控制、速度控制等方面发挥着重要作用。
2)GMR编码器
GMR编码器(Giant Magnetoresistive Encoder)是一种基于巨磁电阻效应的位置传感器。它利用一系列巨磁电阻元件来测量物体的位置。
巨磁电阻效应是一种在特定材料中存在的现象,当磁场作用在该材料上时,电阻值会发生变化。巨磁电阻元件由两个磁性层和一个非磁性层组成,这三层分别为固定磁层、自旋阻挡层和自旋导层。
当没有外部磁场作用时,自旋阻挡层和自旋导层的磁矩方向相互平行,导致电阻值较低。当外部磁场作用在巨磁电阻元件上时,磁矩方向发生变化,自旋阻挡层和自旋导层的磁矩方向不再平行,导致电阻值增加。
GMR编码器是通过测量巨磁电阻元件的电阻值来确定物体的位置。通常,编码器会将物体与巨磁电阻元件放置在一起,当物体移动时,巨磁电阻元件的电阻值会发生变化,编码器通过测量这些变化来确定物体的位置。
GMR编码器具有高分辨率、高精度和快速响应的特点,因此在精密定位系统和工业自动化等领域得到广泛应用。它可以用于测量线性运动、旋转运动和角度位置等。
2 增量式编码器实现原理
增量式编码器也称为正交编码器,是通过两个信号线的脉冲输出来进行数据处理,实现原理如下:
1)一个输出脉冲信号就对应于一个增量位移,编码器每转动固定的位移,就会产生一个脉冲信号
2)通过读取单位时间脉冲信号的数量,便可以达到测速的效果(v=s/t)
3)通过对脉冲信号的累加,和编码器的码盘的周长(转一圈对应距离) 便可以达到计算行走距离的效果(s=n*d)
2.1 编码器信号
A 脉冲输出
B 脉冲输出
Z 零点信号: 当编码器旋转到零点时,Z信号会发出一个脉冲表示现在是零位置 表示编码器转了1圈,可用来记录编码器转了多少圈,从而知道运行距离

编码器线数:
编码器的线数 ,是指编码器转一圈输出多少个脉冲。
举例:
如果一个编码器是500线,说明这个编码器转一圈对应的信号线会输出500个脉冲, A B两相转一圈发出的脉冲数一样的,不过存在90°相位差。
2.2 正反转判断
1)编码器正转信号输出波形:

正输出信号:
信号-A早于信号-B90°输出波形信号
2)编码器反转信号输出波形:
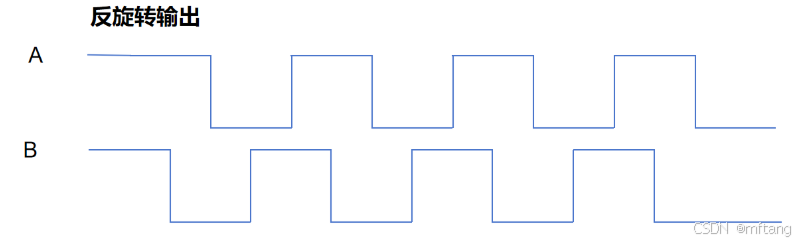
反输出信号:
信号-B早于信号-A 90°输出波形信号