路径处理 | 关键点提取之Douglas–Peucker算法(附ROS C++/Python实现)
目录
- 0 专栏介绍
- 1 路径关键点提取
- 2 道格拉斯-普克算法Douglas–Peucker
- 3 算法实现与可视化
- 3.1 ROS C++仿真
- 3.2 Python仿真
0 专栏介绍
🔥课设、毕设、创新竞赛必备!🔥本专栏涉及更高阶的运动规划算法轨迹优化实战,包括:曲线生成、碰撞检测、安全走廊、优化建模(QP、SQP、NMPC、iLQR等)、轨迹优化(梯度法、曲线法等),每个算法都包含代码实现加深理解
🚀详情:运动规划实战进阶:轨迹优化篇
1 路径关键点提取
路径关键点提取也称为路径降采样,在路径规划中主要用于简化和优化路径表示。一方面,路径降采样可以去除冗余点,从而减少路径中的采样点数量,减小数据存储和传输的成本;另一方面,在路径跟踪和导航时,较少的点可以提高计算效率,减少实时处理的负担。在环境噪声敏感型的算法中,简化路径保留了路径的关键特征和形状,而滤除了噪点,可以增强在执行过程中对微小抖动或误差的鲁棒性
2 道格拉斯-普克算法Douglas–Peucker
道格拉斯-普克算法(Douglas–Peucker)是一种经典的路径关键点提取算法,其基于分治思想,以采样前后路径误差最小化为目标,提取路径关键点。
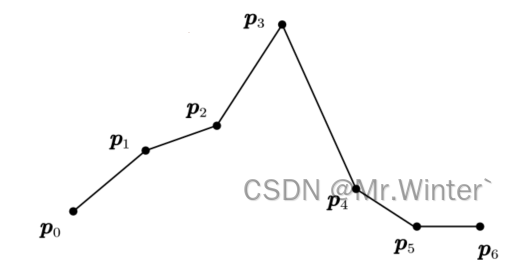
以下图为例阐述算法原理
-
初始给定一组有序的路径点列 { p } 0 N − 1 \left\{ \boldsymbol{p} \right\} _{0}^{N-1} {p}0N−1与误差阈值 δ \delta δ,其中 N N N是路径点数;
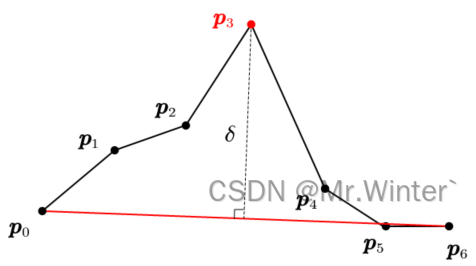
-
以路径首末点组成的 p 0 p N − 1 \boldsymbol{p}_0\boldsymbol{p}_{N-1} p0pN−1为初始待处理线段,查找 p 0 p N − 1 \boldsymbol{p}_0\boldsymbol{p}_{N-1} p0pN−1之间的点列中离 p 0 p N − 1 \boldsymbol{p}_0\boldsymbol{p}_{N-1} p0pN−1最远的点,并判断该距离 d d d是否大于阈值 δ \delta δ,若 d > δ d>\delta d>δ则说明该点不能剪枝(否则剪枝前后曲线误差超过预期);若 d ≤ δ d \le \delta d≤δ则说明该点可以忽略;如图所示需要保留 p 3 \boldsymbol{p}_3 p3;
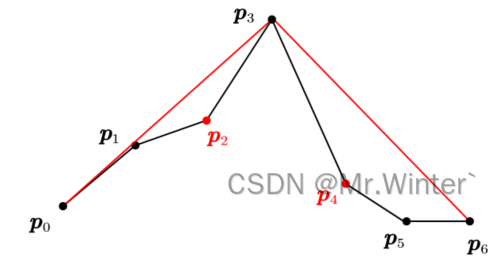
- 对需要保留的节点进行分治,重复步骤(2)直到遍历结束;如图所示,分别以 p 0 p 3 \boldsymbol{p}_0\boldsymbol{p}_3 p0p3、 p 3 p N − 1 \boldsymbol{p}_3\boldsymbol{p}_{N-1} p3pN−1为待处理线段进行递归
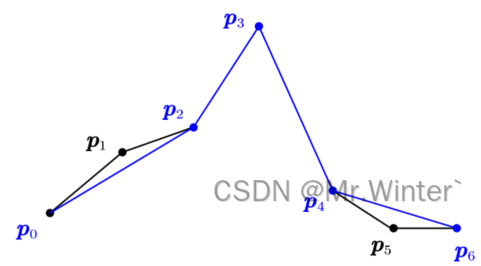
- 最终得到剪枝后的路径点列如图所示
3 算法实现与可视化
3.1 ROS C++仿真
核心代码如下所示
void RDP::process(const rmp::common::geometry::Points2d& path_in, rmp::common::geometry::Points2d& path_out)
{path_out.clear();int max_idx = -1;double max_dist = -1.0;int path_size = static_cast<int>(path_in.size());rmp::common::geometry::LineSegment2d line({ path_in[0].x(), path_in[0].y() },{ path_in[path_size - 1].x(), path_in[path_size - 1].y() });for (int i = 1; i < path_size - 1; i++){double d = line.distanceTo({ path_in[i].x(), path_in[i].y() });if (d > max_dist){max_dist = d;max_idx = i;}}if (max_dist > delta_){rmp::common::geometry::Points2d left_pts, right_pts;left_pts.reserve(max_idx + 1);right_pts.reserve(path_size - max_idx);for (int i = 0; i <= max_idx; i++){left_pts.emplace_back(path_in[i].x(), path_in[i].y());}for (int i = max_idx; i < path_size; i++){right_pts.emplace_back(path_in[i].x(), path_in[i].y());}rmp::common::geometry::Points2d left_result, right_result;process(left_pts, left_result);process(right_pts, right_result);path_out.insert(path_out.end(), left_result.begin(), left_result.end() - 1);path_out.insert(path_out.end(), right_result.begin(), right_result.end());}else{path_out.emplace_back(path_in[0].x(), path_in[0].y());path_out.emplace_back(path_in[path_size - 1].x(), path_in[path_size - 1].y());}
}
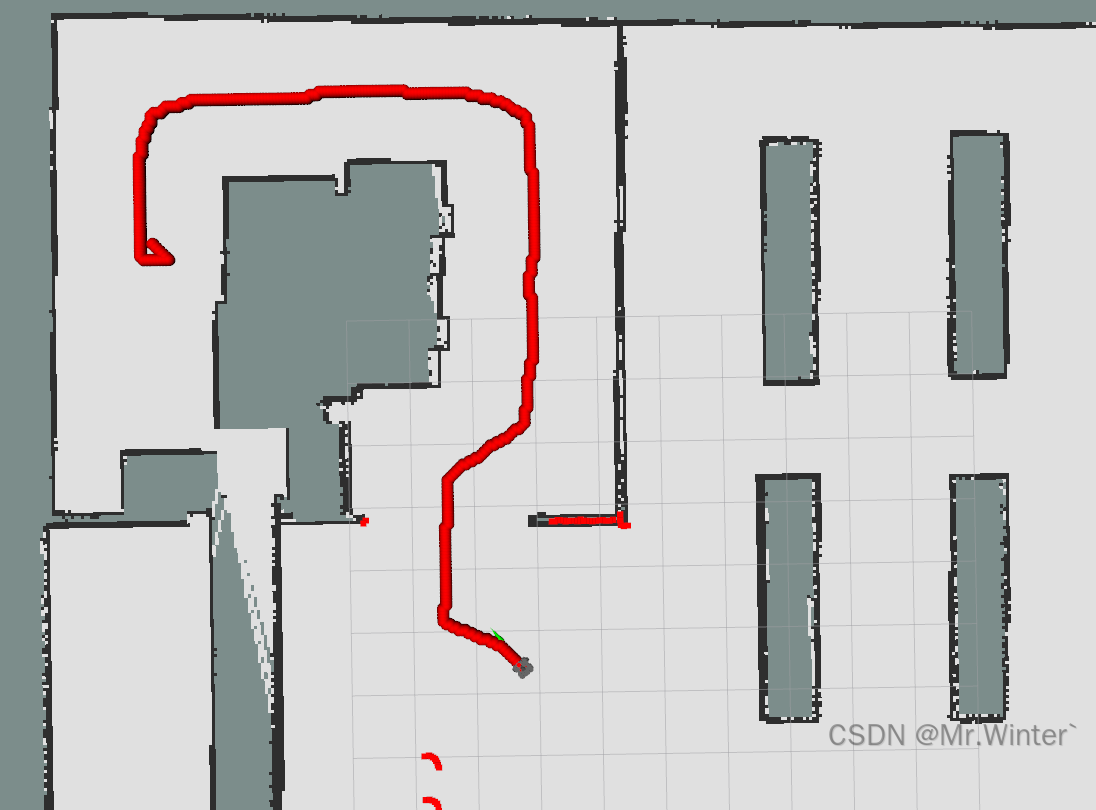
我们用红色的原点表示路径点,绿色曲线段表示路径。下面显示的是未处理的路径点,因为地图栅格分辨率是 0.05 m 0.05m 0.05m,所以看起来非常稠密
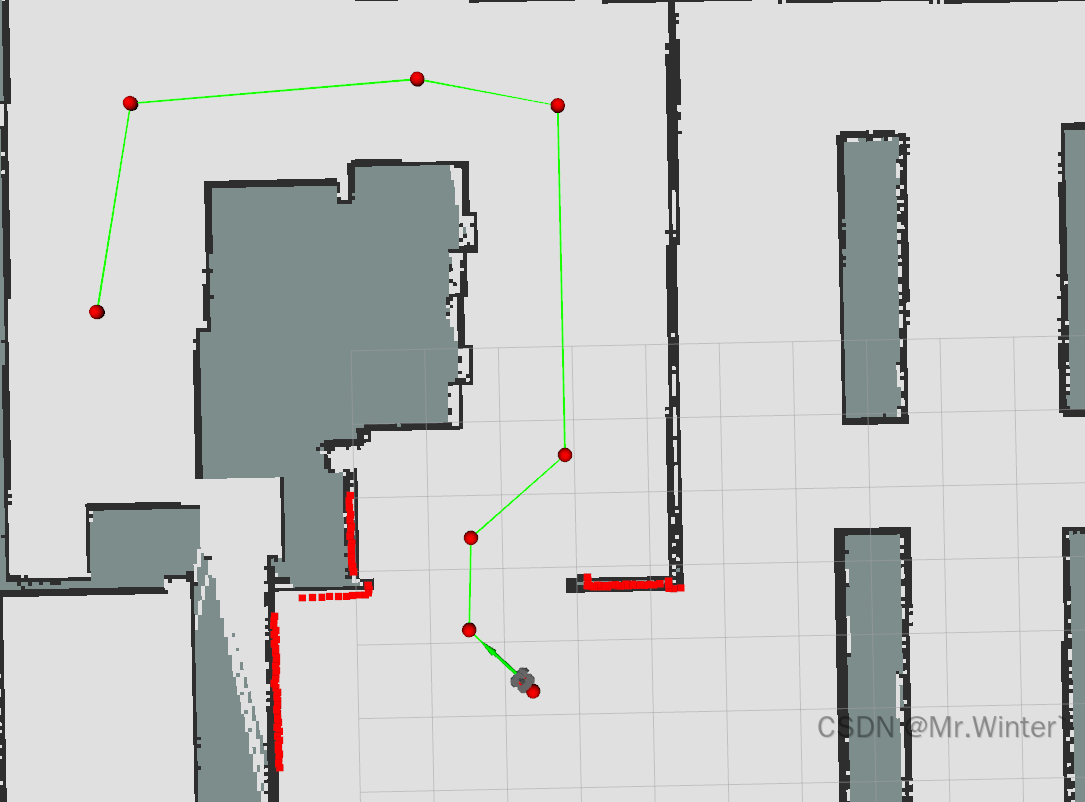
经过算法剪枝后的路径如下所示,可以看到既保留了原始路径的几何特征,又大幅度降低了路径冗余度
3.2 Python仿真
核心代码如下所示:
def rdp_rec(M, epsilon, dist=pldist):dmax = 0.0index = -1for i in xrange(1, M.shape[0]):d = dist(M[i], M[0], M[-1])if d > dmax:index = idmax = dif dmax > epsilon:r1 = rdp_rec(M[:index + 1], epsilon, dist)r2 = rdp_rec(M[index:], epsilon, dist)return np.vstack((r1[:-1], r2))else:return np.vstack((M[0], M[-1]))
完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …